
Sunsha73
-
Compteur de contenus
76 -
Inscrit(e) le
-
Dernière visite
-
Jours remportés
1
Tout ce qui a été posté par Sunsha73
-
C'est bon, on me donne un coup de main 😂
-
Top ! Merci pour ta confirmation 👍
-
Bonjour, J'ai déjà fait plusieurs pack 6S1P pour mon 7 pouces. J'aimerais maintenant faire un 6S2P (Molicel P45B) pour un projet en 10 pouces. J'ai un petit doute concernant mon montage. Est-ce qu'un spécialiste peut confirmer que je suis juste avec ce schéma ? D'avance merci !
-
Salut Phamthom, Tu as une borne S9 normalement sur ton contrôleur Speedybee qui est faites pour ça. Ton servo sera connecté comme ça : Rouge : 5v / Brun : gnd / orange : S9
-
Je pense pas que ça règle ton problème... Même comme ça tu devrais aller beaucoup plus loin... Est-ce que tu as vérifié le réglage de la puissance de ton VTX ? Est-ce que tu es sûr d'être réglé sur bonne fréquence ?
-
Même avis que Motard Geek.... Change déjà l'antenne de ton drone par un model RHCP, et décoche “IRC Tramp” dans l'onglet "ports" de BetaFlight Ensuite, assure toi que ton VTX est unlocké (Appui long 8 s) et assure toi qu'il est bien réglé sur la puissance que tu souhaites : la led rouge doit clignoter 4x pour 500mW ou 5x pour 1W par exemple.
-
Joli projet ! Tu parles d'une page de printable, tu as l'intention de tout faire en impression 3D ? Y compris les top et bottom plate ?
-
Oui, j'ai commandé un pack de filtres ND + CPL. Je testerai. Merci !
-
Hello, J'étais à la recherche d'une action cam plus petite que ma GoPro Hero 11 mini pour monter sur mon 3.5 pouces. La GoPro fait quand même 133 grammes. Le 3.5 pouces la porte bien, mais ça reste lourd.... Je suis rapidement tombé sur la série de GO chez Insta360 et en particulier la dernière GO 3S qui a une résolution 4K en 30 fps. tout ça pour.... 39 grammes. J'ai donc monté les 2 caméras sur mon 7 pouces pour faire un test. Les 2 caméras sont réglé en 4K, 30 fps, stabilisation au max, balance de blancs en 5000k, couleurs standard (naturelles) et tout le reste en auto et sans filtre ND. C'est pas la journée la plus ensoleillée de l'année, mais voilà le résultat ci-dessous. Je trouve que l'Insta360 est impressionnante vu la taille de l'engin... mais GoPro reste GoPro
-
Hello ! J'ai profité du beau temps pour une petite balade ce week-end. Pas de dinguerie. Suis vraiment content du résultat. Ca vol super bien. Je suis qu'à 1250m au début de la vidéo mais tout les signaux sont au vert pour aller (beaucoup) plus loin. Je suis toujours en analogique 😋, mais j'ai un peu optimisé le système avec un filtre LC sur le VTX, un shield entre les ESC et le VTX, un condo avec un TVS Protection Board. J'ai une caméra T-Rex 1500 TVL, un Rush Solo tank et des SKY04X Pro. Ca fait vraiment bien le taf pour de l'analogique ! (Je posterai une vidéo quand je pourrai) Bref... super content de cette machine 😍
-
Assure toi de bien avoir connecté TX sur RX et inversement. J'ai l'impression de ton fil blanc sur le GPS est le TX et que tu l'as soudé sur le TX de la FC. Inverse juste jaune et blanc sur la FC.
-
J'ai enfin pu faire 3 lipos en test ce week-end... malheureusement toujours en PWM. Encore pas mal de truc à optimiser mais déjà c'est incroyablement stable ! Le bruit est une dinguerie 🤪
-
J'ai un Fatshark Scout pour les 'visiteurs'. Ca marche plutôt pas mal sans être hors de prix
-
Juste pour donner une suite.... J'ai pas trouvé la solution. Du coup je reste en PWM pour le moment et j'y reviendrai plus tard....
-
Bon bah les 8 sorties moteurs prennent bien en charge le DMA. Donc c'est toujours pas ça # dma dma ADC 3 0 # ADC 3: DMA2 Stream 0 Channel 2 dma pin C06 0 # pin C06: DMA2 Stream 2 Channel 0 dma pin B01 0 # pin B01: DMA1 Stream 2 Channel 5 dma pin B04 0 # pin B04: DMA1 Stream 4 Channel 5 dma pin A15 0 # pin A15: DMA1 Stream 5 Channel 3 dma pin C08 1 # pin C08: DMA2 Stream 4 Channel 7 dma pin C09 0 # pin C09: DMA2 Stream 7 Channel 7 dma pin A08 0 # pin A08: DMA2 Stream 6 Channel 0 dma pin B10 0 # pin B10: DMA1 Stream 1 Channel 3 dma pin A02 0 # pin A02: DMA1 Stream 0 Channel 6 dma pin A03 1 # pin A03: DMA1 Stream 3 Channel 6 dma pin B06 0 # pin B06: DMA1 Stream 0 Channel 2 dma pin B07 0 # pin B07: DMA1 Stream 3 Channel 2 dma pin B03 0 # pin B03: DMA1 Stream 6 Channel 3 # resource resource BEEPER 1 C14 resource MOTOR 1 B01 resource MOTOR 2 B04 resource MOTOR 3 B03 resource MOTOR 4 A15 resource MOTOR 5 C08 resource MOTOR 6 C09 resource MOTOR 7 B06 resource MOTOR 8 B07
-
J'ai essayé de compiler avec MAX_MOTORS, OCTO_X, DSHOT mais ça n'a rien changé. Je trouve assez peu d'info là-dessus à vrai dire. Mais je continue de chercher... Est-ce qu'il y a un moyen de savoir si les sorties moteurs 5-6-7-8 prennent en charge le DMA ? Ca pourrait expliquer l'impossibilité d'utiliser DShot ? Flywoo de dit pas grand chose dans sa doc....
-
Bonjour, Je suis en train d'assembler un Octo X8 en 3.5 pouces. J'utilise un FC Flywoo F722 Pro (20x20) flashé avec le dernier firmeware Betaflight et 2 ESC 4en1 Flywoo Goku G45M, flashés avec le dernier firmeware AM32. Quand je passe le mixer en Octo X8, j'obtiens le message d'erreur ci-dessous : Je fais donc un /resource sans le cli, et je vois que les moteurs sont pourtant bien tous déclarés. resource BEEPER 1 C14 resource MOTOR 1 B01 resource MOTOR 2 B04 resource MOTOR 3 B03 resource MOTOR 4 A15 resource MOTOR 5 C08 resource MOTOR 6 C09 resource MOTOR 7 B06 resource MOTOR 8 B07 resource LED_STRIP 1 A08 resource SERIAL_TX 1 etc.... Si de repasse en Quad X et que je connecte les ESC l'un après l'autre, tout fonctionne normalement. J'ai essayer de changer le protocoles moteurs en Dshot 600 - 300 - 150 => idem J'ai essayer de passer en Multishot => les ESC ne démarrent pas (bip en continue) J'ai essayer de passer en PWM => ça fonctionne ! J'ai bien les 8 moteurs ! Mais ça m'arrange pas de ne pas avoir les avantages du Dshot.... Quelqu'un aurait une idée ?? J'ai bien envoyé un mail au service technique Flywoo, mais je m'attend par à grand chose. Merci !!
-
Le problème en 1S c'est qu'il faut une caméra capable de fonctionner à 3.3-3.5v J'en ai testé 3 sur mes Nano 2'' 1S : - RunCam Nano 2 (3.0 à 5.5v), 700TVL, 3.2g - RunCam Nano 4 (3.3 à 5.5v), 800TVL, 2.9g - Jinjiean B14 (3.3 à 6.0v), 1200TVL, 3.5g La B14 est largement meilleure que les 2 autres en terme de qualité avec ses 1200TVL. Tu la trouves autour de 10 euros si tu veux tester. Ceci dit ça vaut pas une T-Rex avec un bon VTX, et bien sûr ça reste de l'analogique
-

Drone armé mais les moteurs ne fonctionnent pas
Sunsha73 en réponse au topic de Jeremy6998 dans Entraide
Ceci dit, tu dois pouvoir armer sans que les moteurs tournent avec l'option MOTO_STOP (que j'ai jamais testé) -
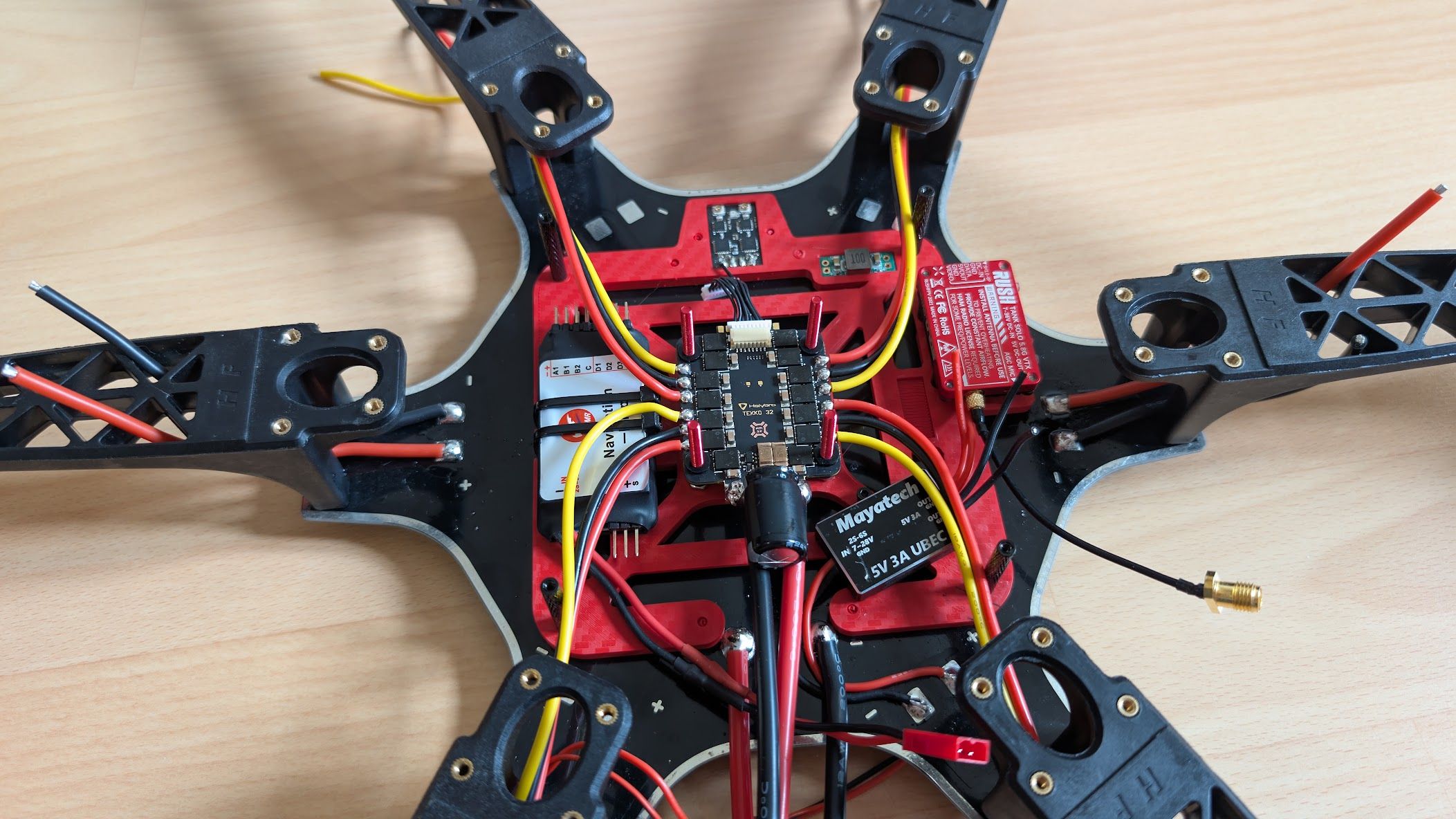
Une p'tite photo d'ensemble juste pour le fun ☺️
-
Ok, j'y retourne dès que possible ! J'ai une question (encore) concernant mon ESC, c'est un Holybro Tekko32 50A Blheli_32 qui m'avait été livré il y a une année en version 32.8. En bien sûr plus possible de mettre à jour... Est-ce que ça vaut le peine de changer l'ESC pour une version AM32 ? (Holybro livre ces ESC avec AM32 maintenant). Ou alors je peut rester en 32.8 sans que ça pose de problème ?
-
Oui alors effectivement je suis resté très calme 🙂 J'y retourne dès que possible
-
Voilà, premier décollage malgré les -4° ici 🥶 J'ai juste chargé le preset 'SupaflyFPV Freestyle 7 inch suis parti faire vol de 60 secondes en cruising avec quelques accélérations. Voilà le graphe des vibrations non filtré... Je sais pas trop comment interpréter ça en fait 😬
-
Voilà, assemblage terminé ! 1291 grammes quand même avec lipo 3300 mah et GoPro. Plus qu'à attendre quelques beaux jours 🥶
-
Juste un p'tit retour : Bah ça tient pas... J'ai régulièrement une hélice qui saute. J'ai essayé avec les Emax AVAN Rush à 3 lames puis avec des Gemfan Hurricane 2015. Même constat. Pourtant je suis en li-ion 18650 1s. Donc très peu de puissance. Du coup j'ai opté pour un solution radicale : J'ai revu mon montage pour faire une configuration 'pusher' Plus de problème 😎