Benoît collas
-
Compteur de contenus
20 -
Inscrit(e) le
-
Dernière visite
-
Jours gagnés
1
Visiteurs récents du profil





Récompenses de Benoît collas
")





Favoris
-
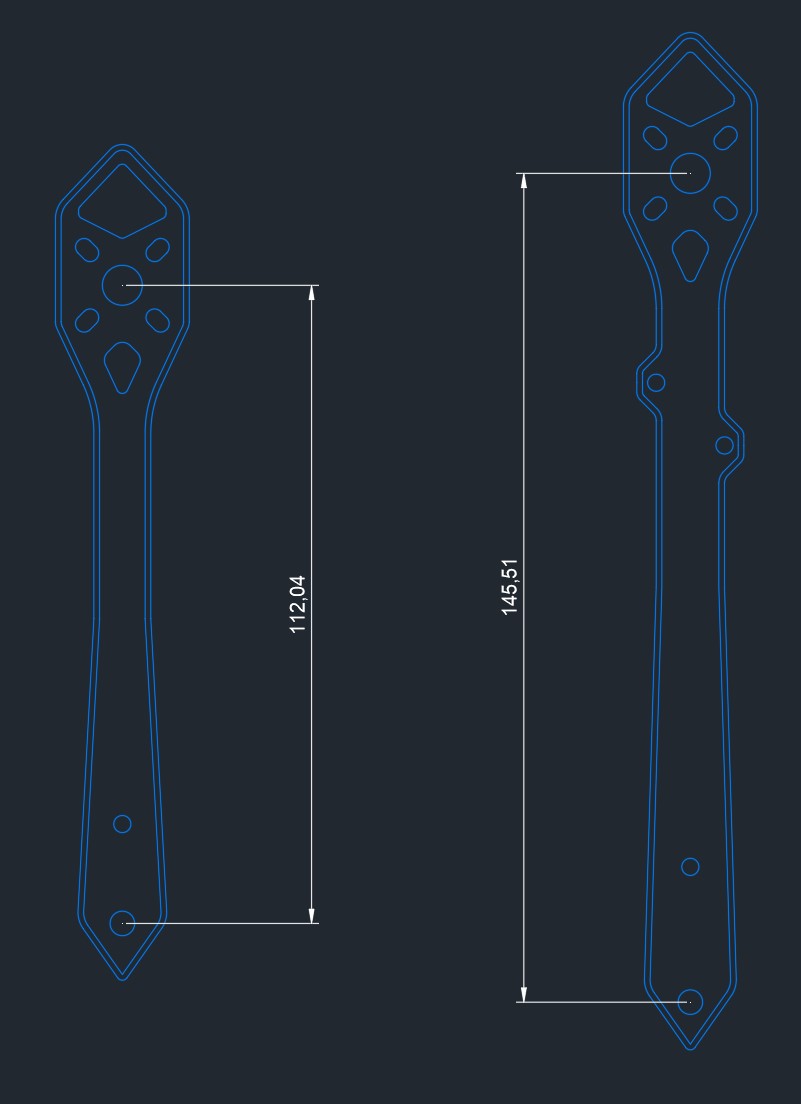
custom 7"
custom 7"Il y a 6 heures, Qnnk a dit :C'est pas mal, par contre j'aimerais bien savoir pourquoi un renfort arrière et pas avant ? tu penses que les vibrations sont sur l'arrière et moins sur l'avant ?

Normalement, comme la déformation est exponentielle en fonction de la longueur, et le bras avant étant proche d'une longueur classique de 5", j'espère que ca passe (c'est aussi l'avantage du DC):
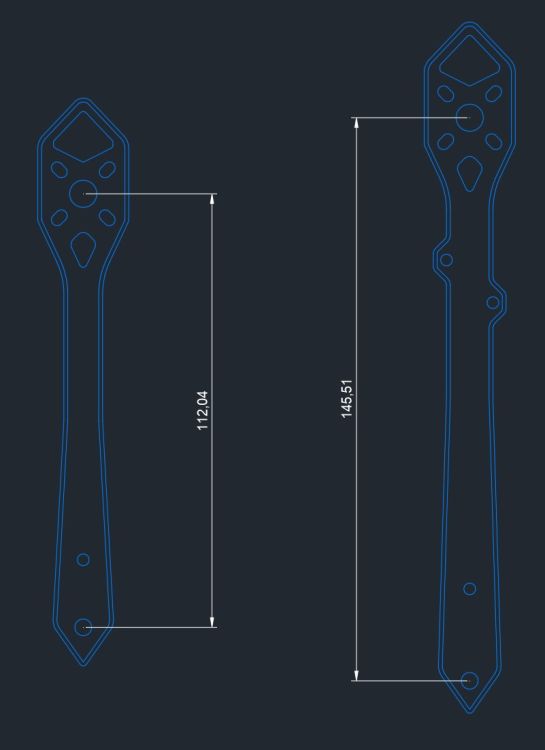
ai pire je pourrais toujours dessiner un renfort qui part de l'entretoise avant jusqu'au moteur (juste en rallongeant les vis moteur)
: pas de pressnuts en plus
a l'arrière le triangle rectangle presque isocèle est super rigide !

-
gyro MPU 6500 vs BMI270
gyro MPU 6500 vs BMI270il y a 8 minutes, nochamo a dit :haha.....
ca aurait été pour un 5", j'aurais fait le cobaye sans hésiter une seconde......
mais pour mon premier 7" [mode puceau du 7"], je ne vais prendre de risque inconsidéré, ca va déjà être blindé de vibrations, si je ne suis pas sûr du gyro, je vais aller dans des emmerdes à n'en plus finir......
Contact diatone il fera certainement quelques choses
-
custom 7"
custom 7"Il y a 3 heures, nochamo a dit :pas encore, je viens de me manger les video de mark spatz sur son 7"..... a priori, je peux deja commencer par repasser en 24kHz voir 16Khz
 (j’avais mis du 48Khz sans meme me poser de question), baisser les I (tout en gardant le master a 1,5), et booster l’antigravity un chouilla,...... le dyn idle est dans ma liste aussi, mais je vais essayer d’y aller par etapes
(j’avais mis du 48Khz sans meme me poser de question), baisser les I (tout en gardant le master a 1,5), et booster l’antigravity un chouilla,...... le dyn idle est dans ma liste aussi, mais je vais essayer d’y aller par etapes Peut-être que baisser le PWM frequency apportera un peu de couple et permettra de mieux driver les moteurs, mais la douceur et la conso du 48kHz me paraissent tjrs plus pertinents. En tout cas je suis curieux de savoir ce qui marchera le mieux.
Le dynamic idle est la grosse priorité je pense si tu veux améliorer le comportement. Le quad devrait gagner en stabilité, à fortiori lors des coupures de gaz. Idem, les reprises se feront mieux parce que les moteurs tourneront déjà plus vite.
-
Futaba et le FPV
Futaba et le FPVBonjour,
Moi pour tous les Drones en FASST avec des RX TFR4sb et TFR4s de FrSky.