nochamo
-
Compteur de contenus
5 611 -
Inscrit(e) le
-
Dernière visite
-
Jours gagnés
227











Récompenses de nochamo
")
Grand Master (14/14)
-
 Rare
Rare
-

-

-

-
 Rare
Rare
Badges récents
5k
Réputation sur la communauté
31
Sujets solutionnés !
Favoris
-
Mobigital 7, la guerre du gramme !
Mobigital 7, la guerre du gramme !alors voila, y a un
couillongénie qui a reussi a faire passer un build vista près des 40gr (pour moi le plus léger était le betafpv 75X a 55gr) : il arrive a 43gr, et il propulse en 2S !
j'ai refais
les calculsl'addition :happymodel crazzybee X 2.2 = 4.4gr (hors câble)
happymodel EX1102 = 2.8gr (x4)
vista naked nebula pro nano = 12.4 gr
frame mobula 7V3 = 5.5gr
gemfan 1635 = 0.5gr (x4)
XT30 = 2.5grTOTAL = 38 gr hors visserie, et hors canopy
ca laisse penser qu'il n'a pas menti sur ses 43gr
j'envisage donc très sérieusement de me lancer dans le build en tentant quelques modifs :
- la FC en sous face de la frame (pour équilibrer un peu)
- découpe de la frame en sous face (pour pouvoir passer la FC), et parceque les arceaux de lipo c'est toujours un peu foireux (meme si ca participe pas mal à la rigidité): maintien de la lipo par un bon elastique bien basique.
- son collage des moteurs à la E6000, j'y crois que très modérément : je resterais sur 2 vis par moteur
- peut être tenter de remplacer ces vis nylon par autre chose (riselan ?), parceque c'est introuvable
j'me dis qu'au pire je le reconverti en analogique, et le vista servira toujours.....
qu'est ce que vous en pensez les copains du stick? (suis je un abruti fini ?...... ok je sais , la réponse est oui! )
-
tune 4.3
Guide de tuning Betaflight 4.3, 4.4 et 4.5Salut,
Le but de ce tuto est de vous aider à obtenir un bon tune pour votre quad, 2-3 lipos devraient suffire.
A noter que des presets viennent de faire leur arrivée avec la Release Candidate. Ca ne vaudra jamais un tune adapté à votre machine, mais ça pourra sans doute convenir à beaucoup de pilotes. Ce guide est un peu long, mais vraiment pas compliqué, soyez rassurés

A la fin de ce post, vous retrouverez les vidéos de la chaîne concernant Betaflight 4.3, 4.4, 4.5 et le Tuning. Mais ce tuto "texte" reste un très bon complément aux tutos vidéo.
Les versions 4.4 et 4.5 de Betaflight n'ont pratiquement aucun impact sur le tuning, ce guide initialement rédigé pour la version 4.3 est 100% applicable. De même que la migration de la 4.3 vers la 4.4 se fait sans problème, on fera juste attention à la nouvelle valeur par défaut de l'anti-gravity (qui passe de 3.5 à 8).
Pourquoi passer en 4.3/4.4/4.5 ?
Parce qu'elles apportent leur lot de nouveautés. Certaines versions majeures de BF n'étaient pas forcément au niveau des attentes. Ce cru est excellent, jamais BF n'a aussi bien volé, ça fait pratiquement un an qu'elle tourne bien, elle a été testée dans tous les sens par des centaines/milliers de pilotes. Au menu des principales nouveautés :- Arrivée des Presets (dans de nombreuses déclinaisons : ils ciblent différents aspects de la configuration par exemple, on a des présets dédiés au lien radio, d'autres aux rates, aux filtres, au VTX etc...)
- Un nouveau filtre dynamique, plus rapide et efficace, c'est sans doute la principale raison de passer en 4.3. Mark Spatz en parle en détail dans cette vidéo
- Une grosse amélioration de l'antigravity (qui booste maintenant aussi les P, c'est très efficace)
- Un nouveau set de curseurs, pour faciliter le tuning
- Une optimisation du Feedforward qui devient davantage paramétrable
- Le remapping presque automatique des moteurs en cliquant sur les moteurs ainsi que la modif du sens de rotation !
- De nouveaux filtres : PT2 et PT3. Ces filtrages seront destinés à remplacer le BIQUAD. Ces filtres règlent qques défauts du BIQUAD (très consommateur en ressources et génère de l'overshoot). Le RC Smoothing s'appuiera par défaut sur du PT3.
- Configurateur : Auto détection de la target, pour éviter les erreurs
- Nouveau mixeur linéaire (en provenance de Emuflight) : montée plus fluide du throttle (2 nouveaux modes en plus du "legacy" : "linear" et "dynamic")
- Le dynamic Idle a été revu et ne dépend plus du DShot Idle
- Optmisation des APIs qui permettent de gérer le SPI DMA, ce qui permet d'éviter que l'utilisation de la Blackbox impacte la boucle PIDs
- Les Warnings deviendront accessibles via MSP de manière "propre", donc plus de bidouille à faire, on aura les Warnings dans l'OSD DJI. Mais cela nécessitera que DJI mette à jour sa façon de gérer cet aspect là (il faudra donc attendre une mise à jour DJI pour en profiter)
- Nouvel élément dans l'OSD : la puissance du lien TX (donc indiquer par exemple si le module Crossfire est à 25, 500, 1000 mW etc. Ca arrivera donc dans l'OSD BF (pour l'OSD DJI, c'est un peu plus compliqué, on devra certainement attendre l'arrivée de la gestion du Canvas mode pour en profiter)
- Support du Crossfire v3 (24 channels, meileure gestion des erreurs...)
- etc.
Le guide de tuning BF4.2 reste disponible ici.
Pré-requis- Il faut tout d'abord récupérer la dernière version du configurateur : https://github.com/betaflight/betaflight-configurator/releases
- A chaque installation d'une nouvelle version, pensez à récupérer la dernière version du configurateur
- Windows 10 est maintenant nécessaire pour cette nouvelle version du configurateur (si vous êtes sous Windows)
-
Avant de démarrer le tune, s'assurer que le quad est sain : vérifier que toutes les vis (châssis, bras, moteurs, hélices...) soient bien serrées, que les hélices ne soient pas tordues, que tout soit bien sécurisé dans la machine (pas de fil pouvant bouger et tapoter la FC ou le gyro par exemple) : tout ce qui peut bouger peut engendrer des vibrations...
Etapes de ce guide :
- Configuration de base et pré-requis
- Réglage des filtres
- Réglage des PIDs
- Ajustement du feeling
- Optimisation du filtrage
- Pour aller plus loin
1. Configuration de base et pré-requisPas de panique ! Ce guide peut sembler assez long, mais il est normalement simple et il y a beaucoup d'images
 Même si l'utilisation de la Blackbox peut-être pratique (on y revient à la fin), ce guide est pensé pour s'en passer.
Même si l'utilisation de la Blackbox peut-être pratique (on y revient à la fin), ce guide est pensé pour s'en passer.
1.1 Récupération de la configuration de baseL'objet de ce tuto n'est pas d'expliquer comment configurer BF, le principe est le même que pour les versions précédentes. Sachez juste que certains réglages initialement dans l'onglet "Configuration" ont migré vers d'autres onglets plus adaptés :
- ESCs dans l'onglet "Moteurs"
- RX dans l'onglet "Recepteur"
Vous pouvez normalement récupérer sans problème l'essentiel de votre configuration de BF 4.2 (Ports, Modes, RX). Vous pouvez également récupérer vos rates, mais attention, par défaut, ce sont maintenant les Actual Rates, pensez donc à sélectionner "Betaflight Rates" s'ils sont à ce format.
1.2 Réglages ESCs
La plupart des ESCs sont aujourd'hui compatibles avec le Bi-directionnel DShot : les ESCs sous BLHeli32 le sont nativement depuis la version 32.7, les ESCs sous BLHeliS peuvent en général être flashés avec BlueJay (ou JESC, ou BLHeli_M).
Si vous avez des ESCs BLHeli32, de bons réglages de bases seront :
- Motor Timing : 23 est bon compromis ("Auto" pour une meilleure efficience, 16 pour plus de réactivité, > 23 pour plus de puissance)
- PWM Frequency : 48 Khz (si vous mettez une valeur supérieure à 24 Khz, dans l'onglet PIDs de BF, vous pouvez activer le "Thrust Linearization" et le mettre à 20-25%, bien que d'après les retours cela ne soit plus aussi important qu'en 4.2)
- Demag compensation : Low (High si vous avez des problème de desync)
-
Rampup Power : Par défaut à 50%, vous pouvez l'ajuster comme suit :
- Pour un Tiny Whoop : > 50%
- Pour un 3" : ~50%
- Pour un 5" : ~40-50%
- Pour un 7" : ~15%
La version 32.8 ainsi que le "variable PWM Frequency" peuvent poser des problèmes, en particulier avec le DShot bidirectionnel activé. Personnellement, je préfère rester en 32.7 pour le moment (quand elle est disponible). La version 32.9 est arrivée il y a qques temps et corrige des bugs de la 32.8. Néanmoins, après avoir testé la 32.9, je suis quand même repassé en 32.7 : avec mes ESCs, ça volait moins bien. D'après les différents retours, cette dernière version ne donne pas toujours les meilleurs résultats, ça dépend vraiment des machines/ESCs. Les ESCs en F3/F4 semblent plus adaptés, mais ça ne reste qu'une hypothèse. Si le "variable PWM Frequency" donne de bons résultats, en particulier avec le max à "By RPM", tant mieux ! En cas de souci, ne pas hésiter à repasser en PWM Frequency fixe.
Les réglages BLHeli32 proposés ici offriront de bonnes performances et devraient limiter les risques de desync. Si vous voulez pousser les ESCs BLHeli32 encore plus loin ou optimiser la configuration d'ESCs sous BlueJay, n'hésitez pas à regarder cette excellente vidéo de Chris Rosser.
1.3 DShot Bi-Directionnel
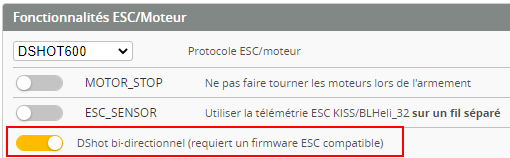
Si vos ESCs supportent le Bi-directionnal DShot, activez-le. Cette fonctionnalité permet de profiter du RPM Filter et de l'Idle dynamique. En général :
- Avec une F7 ou H7, on pourra choisir Dshot600 (la boucle PIDs se positionnera à 8K)
- Avec une F4, on choisira DShot300 (la boucle PIDs passera automatiquement à 4Khz). On peut tenter de se mettre en DShot600 et 8K/8K tant que la charge CPU reste sous les 75%.
Vérifiez dans l'onglet moteur, en faisant tourner les moteurs (sans hélices !) que le taux d'erreur reste à 0%. Si ce n'est pas le cas, il sera préférable de redescendre en DShot300 (voire désactiver le DShot Bi-direcitonnel si les erreurs persistent).
Si vos ESCs ne supportent pas le DShot Bi-directionnel, ce n'est pas dramatique, ça vole bien aussi sans, en partie grâce au nouveau filtre notch dynamique. La preuve en images, avec une ancienne version de la 4.3, et un quad d'entrée de gamme (F4, ESCs BLHeliS, Velox).
Evidemment, vérifiez le sens de la FC, l'ordre des moteurs ainsi que leur sens. Des outils intégrés à l'onglet "Moteurs" permettent de paramétrer ça en quelques secondes.
1.4 Dynamic Idle
Le Dynamic Idle a été revu dans la 4.3 : plus besoin de s'embêter avec le DShot Idle (qui est désactivé lorsque le Dynamic Idle est supérieur à 0). Pour l'activer, il faut avoir activé le Dshot Bi-directionnel.
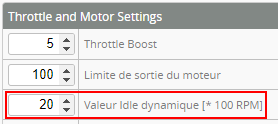
Le Dynamic Idle permet de limiter les risques de desync et permet de mieux contrer le propwash. Plus sa valeur sera élevée, plus il sera efficace pour limiter le propwash mais... plus le quad retombera vite lorsqu'il aura la tête en bas. Voici quelques valeurs de départ conseillées par Chris Rosser, en fonction de la taille de vos hélices :
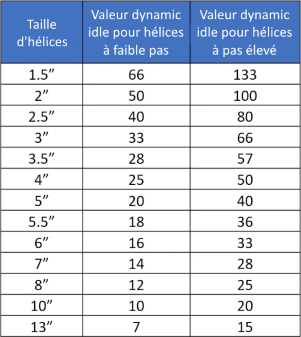
On peut considérer qu'un pas inférieur à 40 est un pas faible, et qu'un pas supérieur à 40 sera un pas assez élevé. Sur mes 5", je règle en général cette valeur à 30.
1.5 RC Smoothing et Feedforward
Les réglages par défaut du RC Smoothing sont très bien :
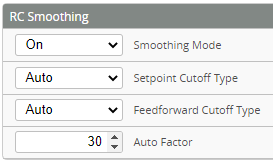
Je n'y touche pas, mais si vous voulez ajouter plus de lissage, des valeurs autour de 50-60 pour le freestyle et 100 pour le vol cinématique sont possibles. Attention quand même, au-delà de 50, cela ajoute une latence au niveau des sticks qui commencera à devenir palpable. Un bon compromis à mon gout est une valeur de 45 : le lissage est suffisant, sans que la latence ne soit perceptible.
Pour le feedforward, on peut soit se rabattre sur le preset adapté à notre lien radio, soit se baser sur cette recommandation des Tuning Notes : pour un lien radio à 500 Hz (Ghost, ELRS), il faut avoir un lissage autour de 65-70 avec une moyenne sur 2 points. Pour un lien à 250 Hz (Tracer, ELRS), un lissage autour de 35-40, toujours avec une moyenne sur 2 points. Pour du Crossfire à 50 Hz et du FrSky, on pourra opter pour un lissage sur 3 points.
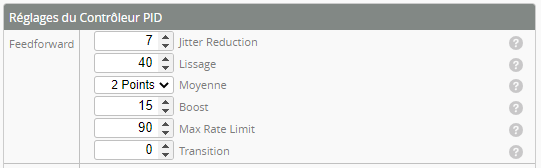
Plus de détails : Betaflight RC Smoothing | HIGH performance link KILLER (UAV Tech), BF 4.3 Tuning Guide Part 5: Feedforward! (Chris Rosser)
Pour faire simple, on recommandera d'appliquer le preset correspondant à votre lien radio, et repasser le RC Smoothing à 45.
1.6 Mode Expert et derniers ajustements
Passez en mode expert pour afficher l'ensemble des sliders de réglages des PIDs.
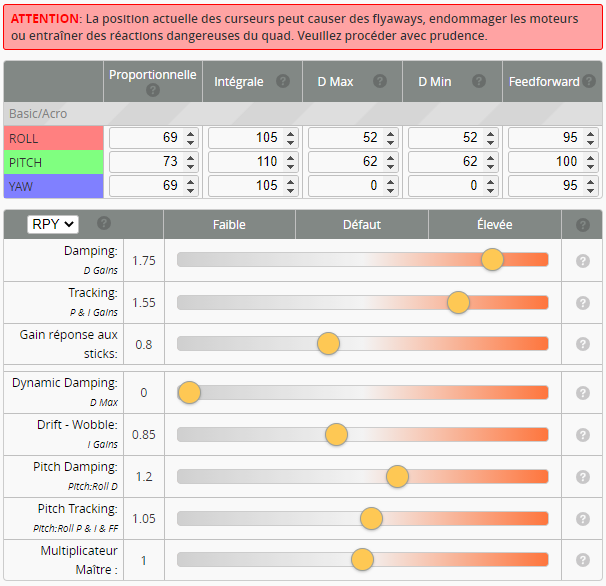
Même si en principe les réglages PIDs et Filtres de la 4.2 peuvent convenir, on recommandera de partir des réglages stocks.
Comme pour les versions précédentes, on désactivera le "Dynamic Damping" (anciennement D-Min) en poussant le slider au minimum. Dans un premier temps, on peut en faire autant pour le "Gain réponse aux stick" (Feedforward). Il faudra penser à le réactiver après avoir réglé le "Damping" (D) et le Tracking (P).

Sur un 5", je continue en général à suivre les recommandations de Mark Spatz en mettant le TPA à 1750. Mais sur certains setups, je l'ai redescendu à 1450 car j'avais des oscillations de D lors de full dans certains conditions.

A noter : en 4.4, le TPA a été déplacé (à juste te titre) dans l'onglet PID et ajoute un liste déroulante pour choisir facilement s'il doit s'appliquer que sur les D (par défaut) ou sur les P et les D :

Arrivez là, vous pouvez faire un premier vol de test pour vous assurer que tout va bien (bruit, chauffe moteurs...).
2. Réglage des filtres
Comme en 4.2, on réduit le filtrage autant que possible en s'assurant que les moteurs ne chauffent pas trop.Moins on filtre, et moins le MCU aura besoin de travailler -> le quad sera plus réactif/connecté et la gestion du propwash en sera améliorée. Le but est donc de diminuer le filtrage autant que possible... sans cramer les moteurs ^^
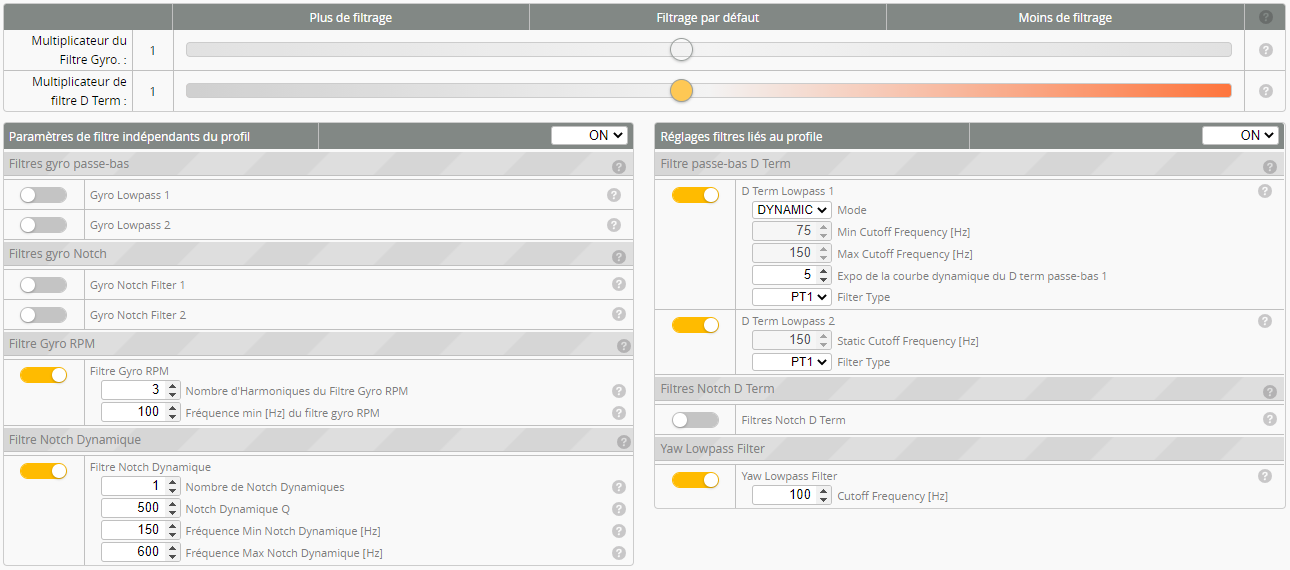
Avec les curseurs, c'est très simple : plus on pousse à droite (et la valeur monte) et moins on va filtrer.
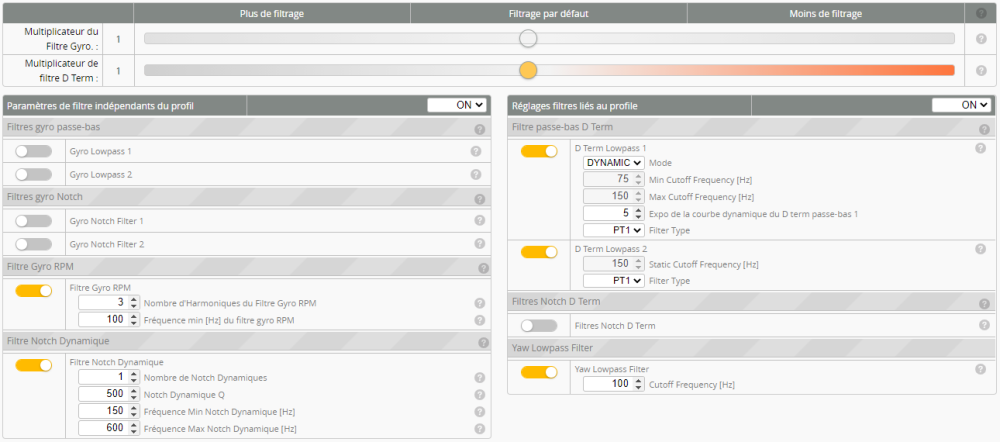
Vous pouvez conserver les valeurs par défaut pour le RPM Filter et le Filtre Notch Dynamique.
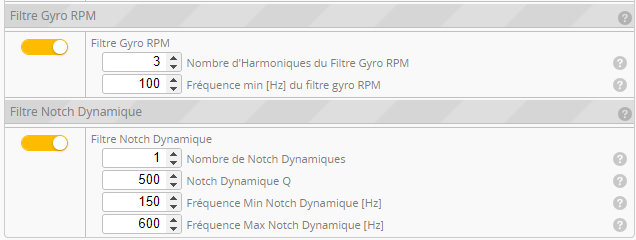
Si le RPM filter est désactivé (pas de DShot Bi-directionnel), les valeurs du filtre Notch Dynamique changent (3 notches, Q à 300). Selon les configs, on pourra jouer sur le Q et le nombre de notchs pour filtrer plus ou moins (se référer aux bulles d'aide), voir même élargir la bande de fréquences surveillée (en démarrant à partir de 100 Hz par exemple).Sur la plupart des setups, il est possible de complètement désactiver les filtres gyro. Vérifiez que le quad se comporte toujours bien après avoir décoché tous les boutons. Assurez-vous, après avoir cliqué sur "Sauvegarder", que les boutons restent bien désactivés :

Si jamais la désactivation de ces filtres posait problème avec votre machine, conservez le slider "Multiplicateur du filtre Gyro" et bougez-le en même temps que le prochain slider. Un choix prudent consiste à désactiver le Gyro Lowpass 1 et ne garder que le Gyro Lowpass 2 avec une valeur de slider assez élevée. Ainsi le filtre consommera peu et continuera de nettoyer le "bruit" dans les hautes fréquences.
On s'attaque ensuite au slider "Multiplicateur de filtre D Term". Progressivement on va le pousser vers la droite en faisant à chaque fois un vol de test de 30 secondes pour s'assurer que le quad n'a pas un comportement anormal (vibrations, bruits anormal, fly away...) et surtout que les moteurs ne sont pas trop chauds. Tant que vous pouvez les garder en main sans que ça soit insupportable, c'est que ça va encore. Mieux vaut tout de même garder un peu de marge pour les périodes les plus chaudes et les hélices/moteurs fatigués.
A partir de 1.4, ça devient pas mal, mais si vous le pouvez, allez plus loin.

Personnellement, je désactive aussi le filtre passe-bas sur le Yaw.

Voilà, c'est terminé, on a une bonne base de filtrage. En fin de tuto, on verra d'autres alternatives pour limiter encore davantage le filtrage si le quad le permet.
3. Réglage des PIDs
Avec la 4.3, le principe est toujours le même qu'avant, mais les termes ont changé, les "P", "I" et "D" sont remplacés par des concepts plus concrets : Damping (Amortissement = "D"), Tracking (Réactivité du quad = "P"), Wobble (Oscillation/Remous = "I"), Réponse des sticks (= Feed Forward).
Une vidéo en fin de tuto (ou les 30 premières secondes de celle-ci) vous donne un aperçu des manœuvres simples et indispensables au tuning : (demi-) flip sec, (demi-) roll sec, "pompage" des gaz, manœuvres à propwash en laissant le quad retomber dans ses perturbations, et couper les gaz avec le quad sur la tranche ou le dos. 30-40 secondes suffisent pour avoir un vol test représentatif.
On va commencer par régler le "Damping" ("D"), le but est de l'augmenter autant que possible, sans avoir de bruits bizarres, fly away ni de moteurs chauds. Ici encore, il faudra procéder par "cran" avec des vols de tests pour vérifier la température et le son des moteurs. L'amortissement porte bien son nom, lors de mouvements secs, il aide à stopper le quad avant qu'il ne dépasse la consigne. Il contribue aussi à limiter le propwash. Typiquement, quand le Damping est trop élevé, lorsque les gaz sont à fond, les moteurs font un bruit caractéristique d'oscillation très rapide dans les aigus.
On passe au slider concernant la réactivité du quad : le "Tracking" ("P" et "I"). Le but cette fois va être de trouver la valeur qui permet d'obtenir un arrêt net et précis du quad lors de flips et de rolls très rapides/secs. Si le Tracking est trop bas, l'arrêt du quad va se faire de manière peu précise en ralentissant sur la fin, il sera un peu "mou". S'il est trop haut, il y aura alors de l'overshoot sur les flips et les rolls : le quad va faire un rebond très rapide avant de s'arrêter correctement (il dépasse un court instant la consigne avant d'y revenir), le rebond est audible.
Bonne nouvelle : quand on en est là, le plus gros du boulot est terminé

Le "Gain de réponse aux sticks" est à ajuster selon ses gouts. Le Feed Forward détecte les mouvements rapides des sticks et boost les P pour améliorer la latence, il anticipe quasiment le mouvement. Une valeur trop haute entrainera de l'overshoot sur les mouvements très rapides. C'est donc à ajuster selon son style de vol. Le but étant de le booster autant que possible sans que cela entraine de mouvements disproportionnés. J'ai tendance à réduire cette valeur au fil du temps. Aujourd'hui le bon compromis pour mon style de vol se situe autour de 100 de FeedForward, voire un peu en dessous.
Le "Wobble" ("I") permet au quad de mieux résister aux perturbations extérieures. Mettez un coup de gaz et laissez le quad retomber (pas jusqu'au sol
 ) sur la tranche ou sur le dos, vous verrez s'il est bien stable. Une valeur trop faible entrainera un quad qui oscille légèrement, sensible au vent, bref, qui ne tient pas sa consigne. Une valeur haute donnera une sensation de quad "rigide", ancré dans sa ligne, limite robotique, voire même des vibrations. La valeur par défaut est une bonne base. L'ajustement dépendra aussi des gouts personnels.
) sur la tranche ou sur le dos, vous verrez s'il est bien stable. Une valeur trop faible entrainera un quad qui oscille légèrement, sensible au vent, bref, qui ne tient pas sa consigne. Une valeur haute donnera une sensation de quad "rigide", ancré dans sa ligne, limite robotique, voire même des vibrations. La valeur par défaut est une bonne base. L'ajustement dépendra aussi des gouts personnels.
Les 2 sliders suivants, "Pitch Damping" et "Pitch Tracking" permettent de compenser une différence de comportement entre le Pitch et le Roll. Par exemple, si le Pitch peut tolérer des PIDs plus hauts, ou nécessite plus de Damping, ces sliders permettront d'ajuster de manière optimisée chaque axe, plutôt que de "niveller par le bas" en fonction de l'axe le plus sensible. En général, les valeur par défaut sont pas mal, on entre ici dans du "fignolage".
Enfin, le slider "Multiplicateur Maître" permet d'augmenter/diminuer toutes les valeurs ajustées précédemment en conservant leur cohérence (balance P/D, balance P/I, FeedForward, Pitch/Roll). C'est aussi un moyen de dépasser les valeurs par défaut permises par les précédents curseurs. Certains pilotes commencent le tuning par augmenter cette valeur aux alentours de "1.3", puis ajustent les autres sliders à partir de ce point départ.
Normalement, avec l'Antigravity, le nez du quad ne devrait pas piquer lors des coups de gaz. Vous pouvez le tester en "pompant" sur les gaz. Si vous constatez un comportement anormal du "nez" du quad lors des appels ou arrêts des gaz, il faut regarder du côté de cette fonctionnalité. En version 4.4, la valeur par défaut de 8 est assez élevée, nous ne devriez pas avoir à la modifier.
4. Ajustement du feeling
N'hésitez pas à tester les Actual Rates ou les ajustements du Feedforward pour trouver ce qui vous convient le mieux. Par habitude, je suis resté sur mes anciens rates au format Betaflight.La valeur de coupure de l'I Term Relax change pas mal de feeling. Je le monte un peu (à 17 au lieu de 15) pour un quad plus "rigide". Libre à vous d'activer ou non le I Term Rotation. J'avais l'habitude de le faire par le passé pour améliorer le comportement du quad lors de Yaw spins, mais ça ne m'a pas manqué sur cette 4.3.
Pour "nettoyer" un peu nos vols, on peut aussi ajouter un chouilla de dead band (onglet Récepteur). C'est une zone au centre des sticks qui est "morte". Typiquement ça peut effacer quelques tremblements et limiter "l'injection de Yaw" sur des gros coups de gaz (le stick peut facilement se déporter un peu sur la gauche ou la droite). J'en ai ajouté un peu récemment et ça ne fait pas de mal (3 sur le Yaw, 2 sur le reste). A vous de trouver la quantité nécessaire pour pas que ça soit gênant : une trop grande zone neutre fera apparaître une sorte de temps mort lors de transitions rapides via le centre des sticks.
5. Optimisation du filtrage
Nous avons vu au début de ce guide la méthode "classique" de réglage des filtres (et en particulier du D Term) en utilisant le slider. Cette méthode donne de très bons résultats, mais d'autres approches sont possibles, par exemple, en désactivant le filtre passe-bas dynamique et en posant un unique filtre LPF.C'est quelque chose qu'on faisait déjà avec un BIQUAD (cf. méthode de Chris Rosser), mais l'introduction du nouveau filtre PT2 dans Betaflight 4.3 ouvre de nouvelles possibilités en corrigeant quelques défauts du BIQUAD (gourmand et générant de l'overshoot). Cette approche peut nécessité l'utilisation de BlackBox.
J'avais mené quelques tests/comparatifs de ces différentes approches de filtrage, vous pourrez les retrouver ici :
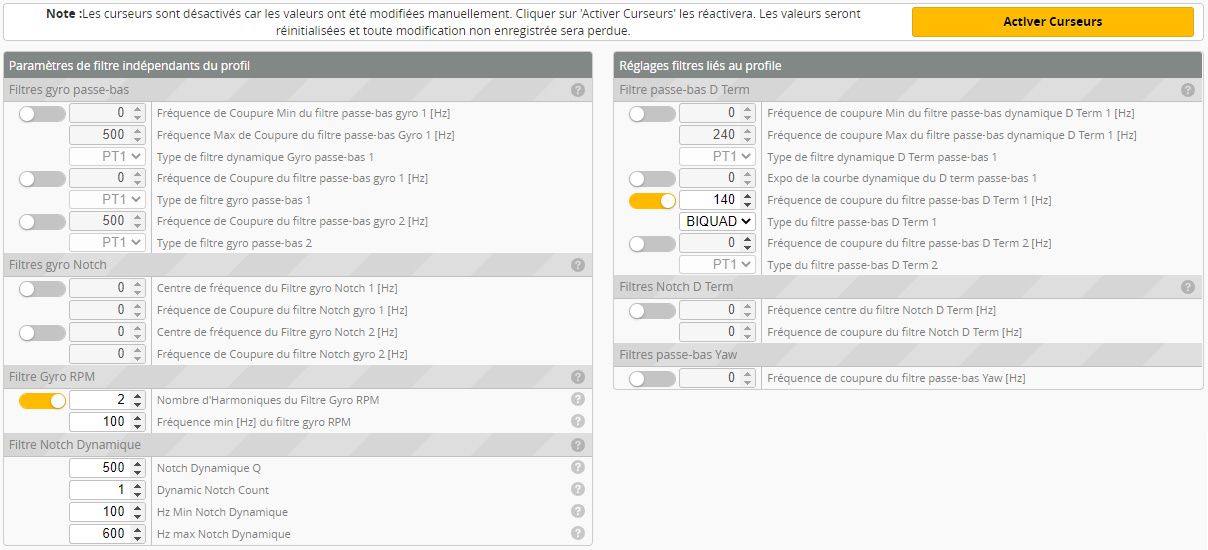
Citation1. Filtrage BIQUAD uniquement
J'ai d'abord commencé avec mes réglages "habituels", juste un BIQUAD sur le DTerm :
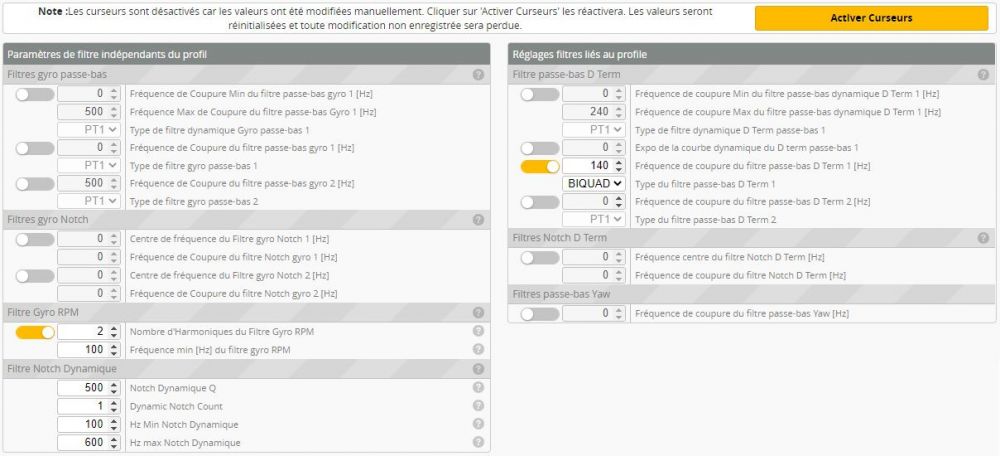
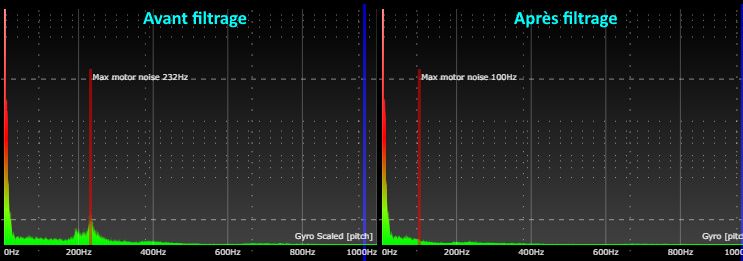
C'est ce que je volais déjà, ça marche très bien ainsi.
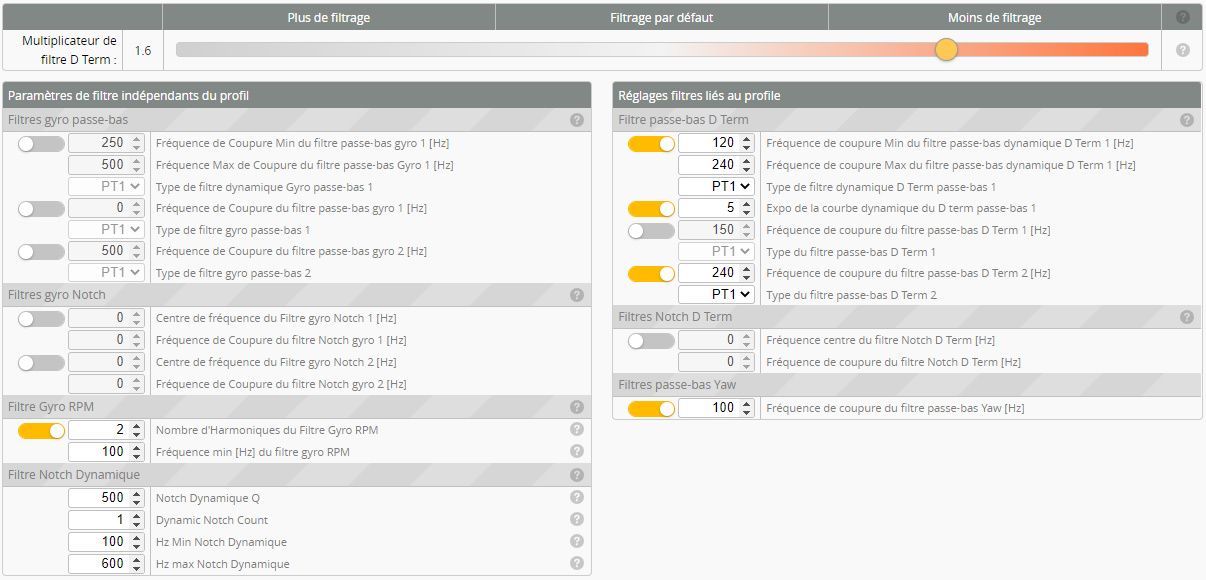
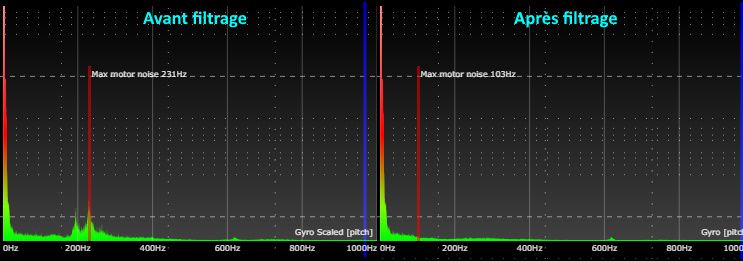
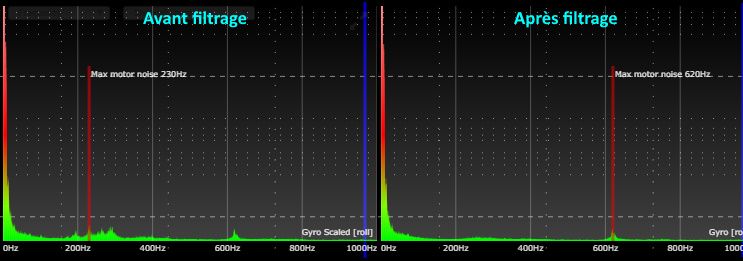
2. Filtrage avec slider D TERM
Ensuite, je suis revenu au filtrage "traditionnel", avec le slider DTerm à 1.6 :
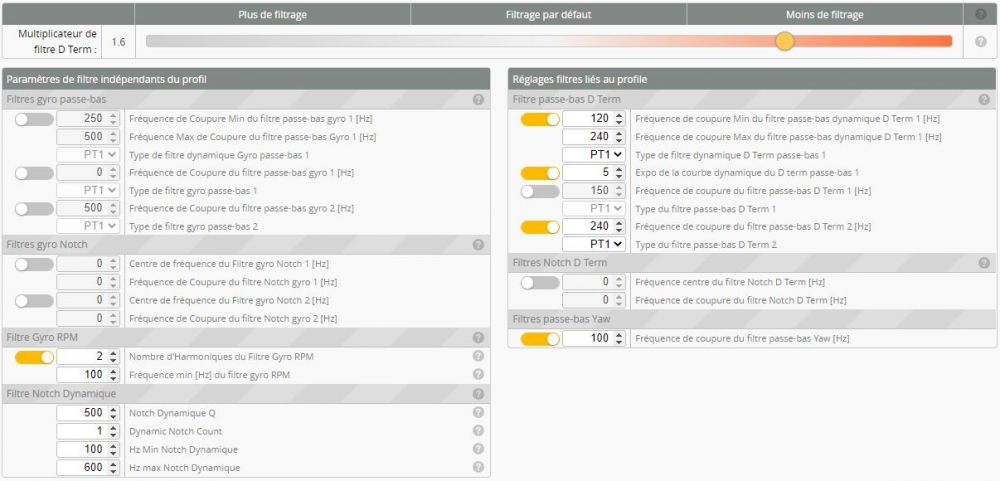
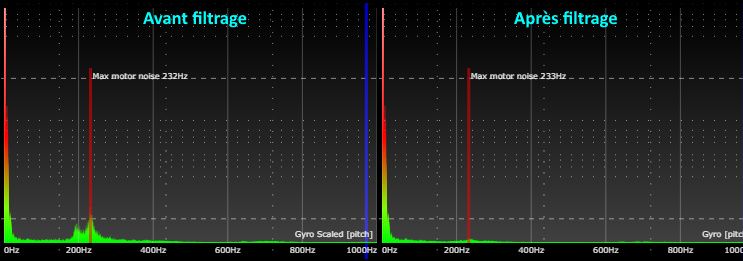
On voit que c'est un peu plus propre avant filtrage, et carrément top après filtrage. Mais j'entendais un léger bruit de vibration de frame assez assez aigu. Effectivement, sur le Roll, on voit un petit pic autour des 650 Hz !
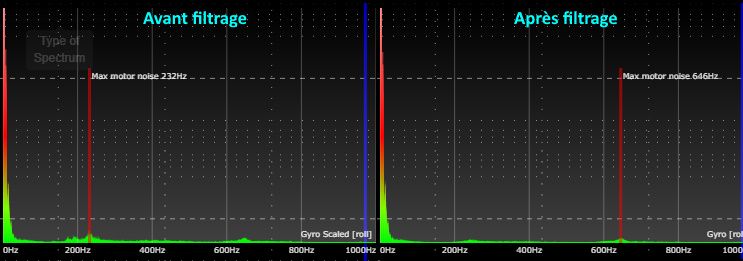
En terme de vol, c'est vraiment top, mais avec un poil plus de propwash que le BIQUAD uniquement (ça reste léger).
3. Filtrage avec PT2
Au point où j'en étais, je me suis dis "pourquoi pas tester le nouveau filtre PT2 à la place du BIQUAD ?". Les filtres BIQUAD nettoient très bien, mais sont très consommateurs en ressources et peuvent provoquer de l'overshoot. Le nouveau filtre PT2 (qui est en gros un double PT1) est censé faire à peu près la même chose mais en étant plus rapide et sans générer d'overshoot.
Niveau vol, c'était bien, mais à la BB, ce n'est pas aussi propre dans les basses fréquences qu'avec les sliders (ca reste très bien quand même). De plus, j'entendais à nouveau un sifflement de frame... qu'on retrouve bien sur le Roll, encore une fois autour de 650 Hz :
4. Filtrage avec PT2 + un notch supplémentaire pour nettoyer les haute fréquences
J'ai ajouté un second notch et un peu augmenté la plage de détection (100-700) du filtre dynamique pour qu'il s'occupe du pic dans les hautes fréquences :
Sur le roll :
L'amélioration est très très légère : on entend moins le bruit aigu de vibration, mais la différence est très peu observable dans la BB.
5. Filtrage PT2 + PT1 pour les hautes fréquences
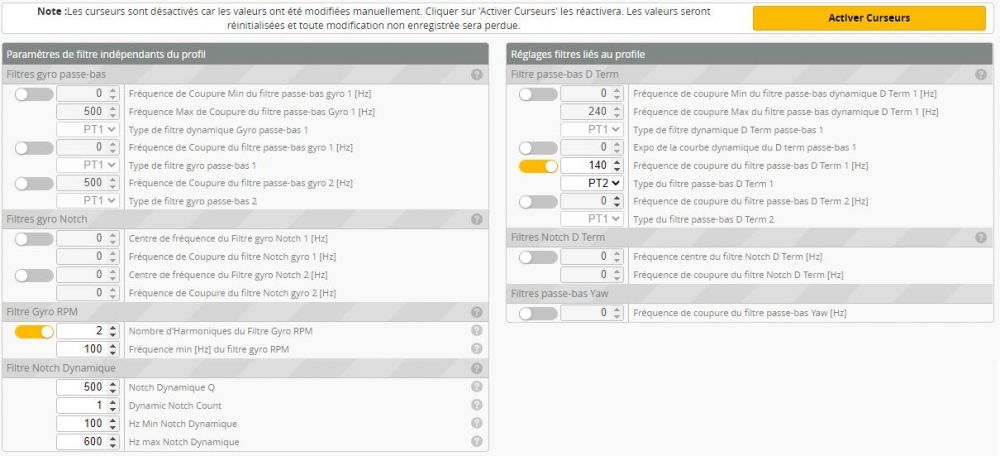
On revient sur un notch dynamique classique (un seul notch) mais cette fois, on tente de nettoyer les hautes fréquences avec un PT1 (qui nettoie à partir de 600 Hz). Du fait que ça soit un PT1 et qu'il soit positionné très haut, sont coût est très mesuré.
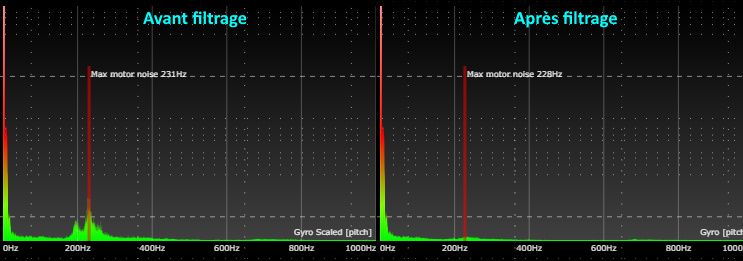
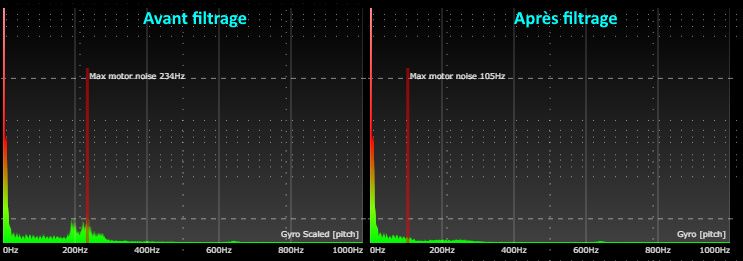
Sur le pitch, on obtient un filtrage aussi propre qu'avec les sliders !
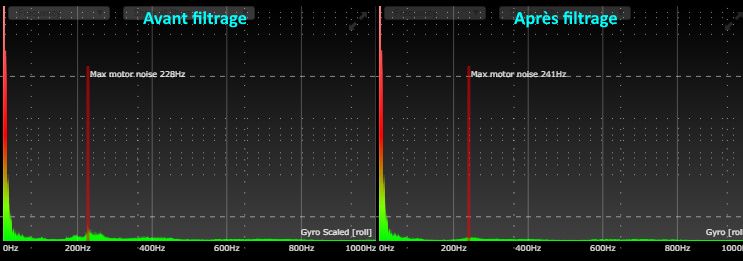
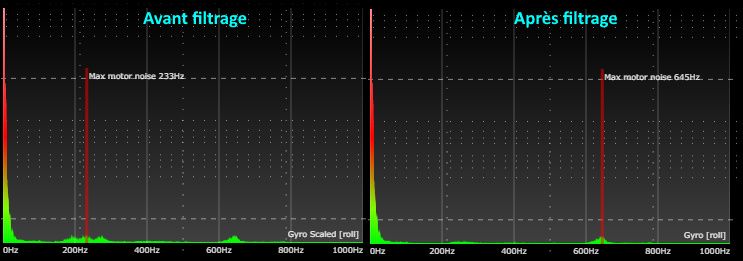
Sur le roll, idem, et on constate que le pic de 650 Hz a été supprimé (et la frame ne produit plus le sifflement aigu).
Conclusion
- L'utilisation du slider reste la méthode la plus simple, avec une très bonne efficacité
- Le BIQUAD semble plus rapide (un poil moins de propwash) mais ne filtre tout de même pas aussi bien qu'avec les sliders (à 1.6, voir plus) dans les fréquences les plus basse, par contre, il nettoie mieux dans les hautes fréquences.
-
Le PT2 permet d'avoir le meilleur des 2 mondes : un filtrage ultra clean, avec de meilleures performances que le BIQUAD (donc moins de propwash), sans overshoot. Par contre, il ne nettoie pas aussi bien que le BIQUAD les hautes fréquences, et peut éventuellement nécessité l'ajout d'un PT1 pour nettoyer les restes. La Blackbox peut donc s'avérer indispensable, ce qui pourrait décourager (même si ça prend 2 minutes ).
Autant on peut facilement visualiser l'efficacité du filtrage, autant la rapidité d'un LPF dynamique (PT1) + LPF statique (PT1) VS un simple LPF statique en PT2 est plus difficile à mesurer (et dépend aussi des régalages). Seul le propwash peut vraiment aider à faire la différence, et je trouve que j'ai de meilleurs résultats sans le filtre dynamique, même si la différence est loin d'être conséquente.
En résumé :
- Simplicité et efficacité : slider D Term
- Optimisation maximale : filtre statique PT2 (+ ajustement à la blackbox)
Ce ne sont que mes retours sur une session, n'hésitez pas à partager vos expériences et sensations sur ces différentes approche de filtrage.
6. Pour aller plus loin
Voici un aperçu d'un vol de test avec le tune décrit dans ce guide (Apex 6S, 2306.5 1950KV, Ethix P3). Je n'ai fait qu'une seule session avec, il sera certainement amené à évoluer, mais c'est déjà pas mal :Le TPA dans les dernières versions de BF n'agit (par défaut) plus que sur les D. Il permet d'atténuer les D de X% de manière linéaire à partir d'une valeur de gaz donnée. Idéalement, lors du tuning, il faudrait le désactiver. Honnêtement, je ne me suis pas donné cette peine. Le TPA permet de garder des valeurs de D assez élevées, puisqu'elles seront atténuées en bout de stick des gaz. Les valeurs par défaut sont une bonne base, mais vous pouvez remonter la valeur du "breakpoint" si vous pouvez mettre des gros full sans que le quad fasse des bruits d'oscillation de D (il est à 1500 chez moi).
Pour vérifier la qualité de votre tune et trouver des pistes d'amélioration, il vous reste la BlackBox. Mais vraiment rien d'obligatoire. J'utilise un peu la BlackBox pour pour regarder où se trouve le bruit, vérifier l'efficacité du filtrage et voir comment le gyro colle au Setpoint sur les différents axes. 3 outils pratiques :
- BlackBox Explorer : https://github.com/betaflight/blackbox-log-viewer/releases (tuto WAF)
- PID Analyzer (Plasmatree) : https://github.com/Plasmatree/PID-Analyzer (tuto WAF)
- PIDToolbox : https://github.com/bw1129/PIDtoolbox
EDIT du 14/06/2022 : la version 4.3 finale est sortie, c'est l'occasion de résumer toutes les nouveautés sur le blog et en vidéo :
Dans cette vidéo, on fait un tune complet, en utilisant uniquement les sliders de Betaflight, ça vous permettra de mieux voir comment ça se passe en pratique, sur le terrain :
Dans cette dernière partie, on reprend les bases du fonctionnement d'un contrôleur de vol avant de voir comment utiliser la Blackbox pour analyser le comportement de notre quad et optimiser son tune :
Présentation des nouveautés de la version 4.4 :
Présentation des nouveautés de la version 4.5 :