Jerome
-
Compteur de contenus
9 220 -
Inscrit(e) le
-
Dernière visite
-
Jours gagnés
445











À propos de Jerome

Récompenses de Jerome
")
Grand Master (14/14)
-
 Rare
Rare
-
 Rare
Rare
-

-

-
 Rare
Rare
Badges récents
7,5k
Réputation sur la communauté
40
Sujets solutionnés !
Favoris
-
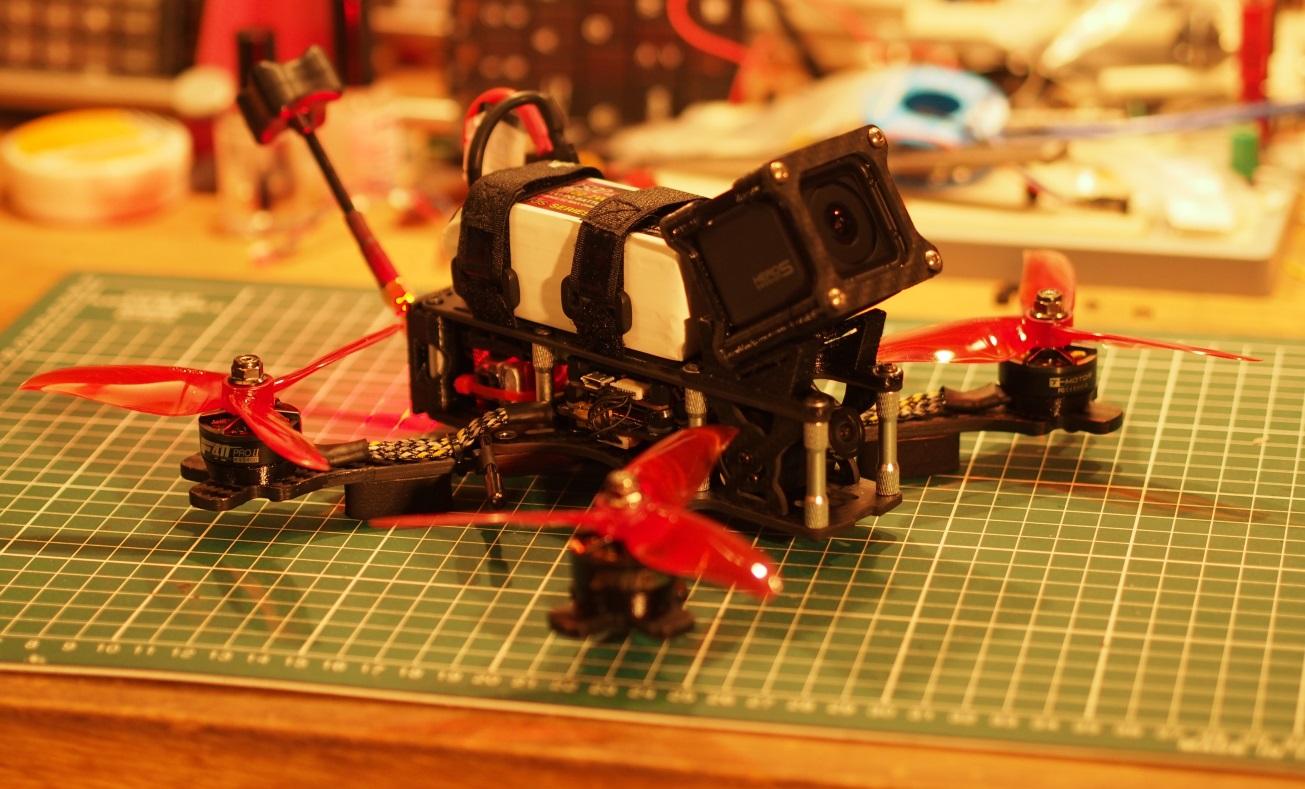
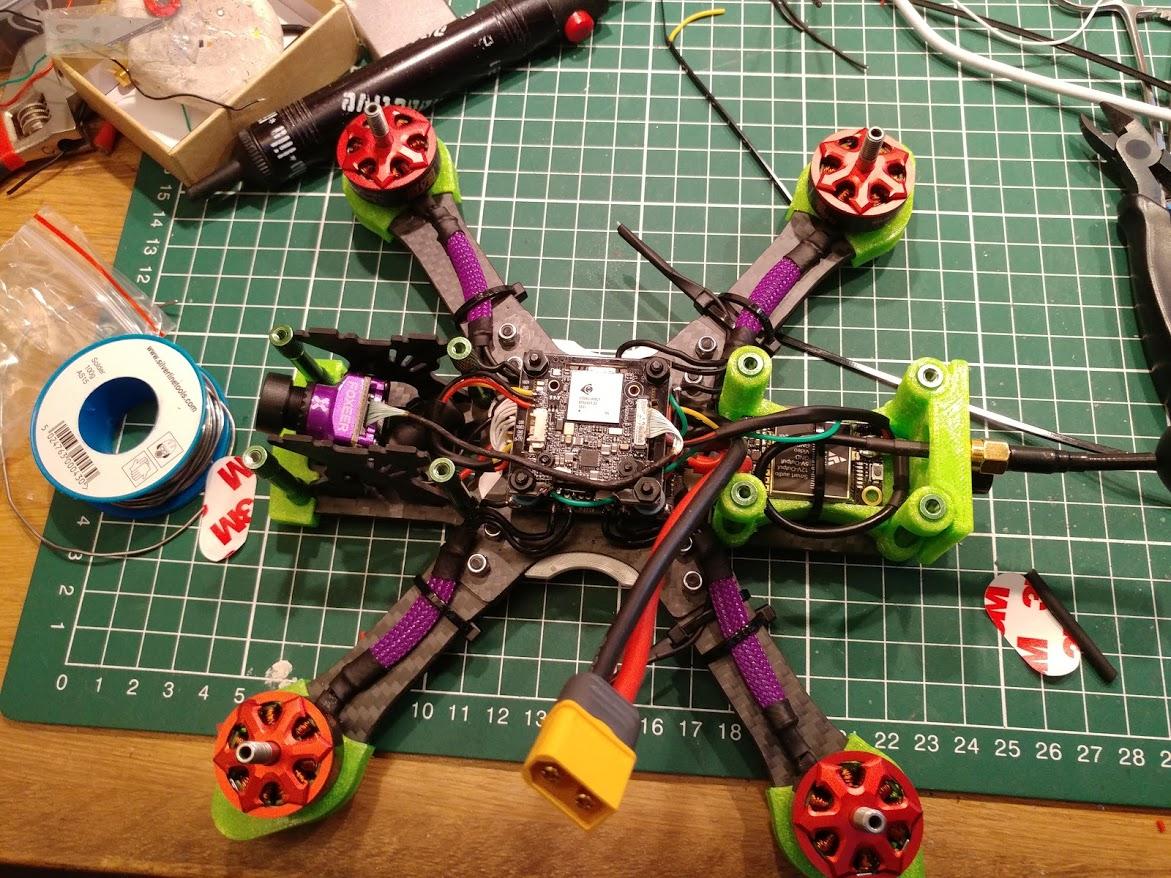
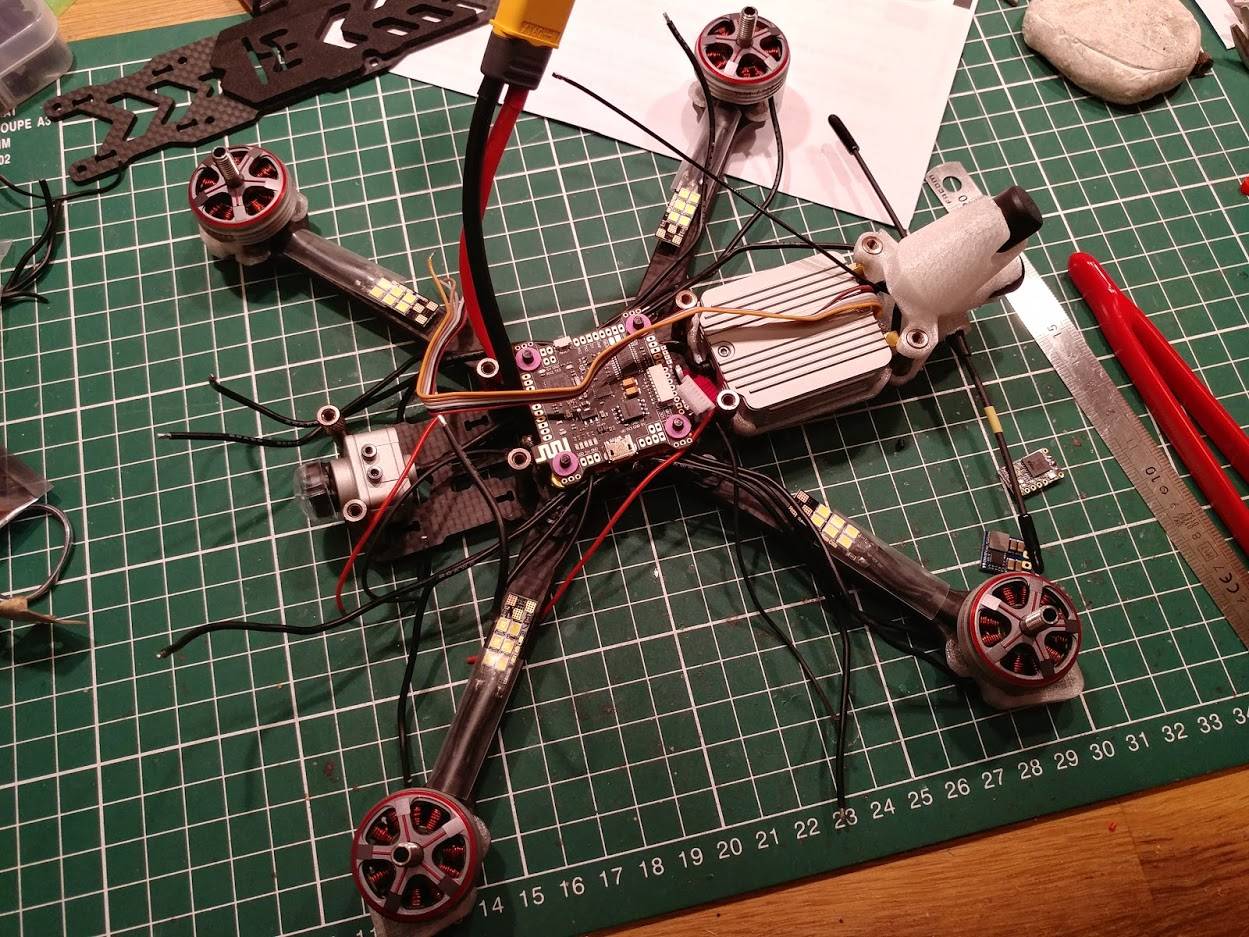
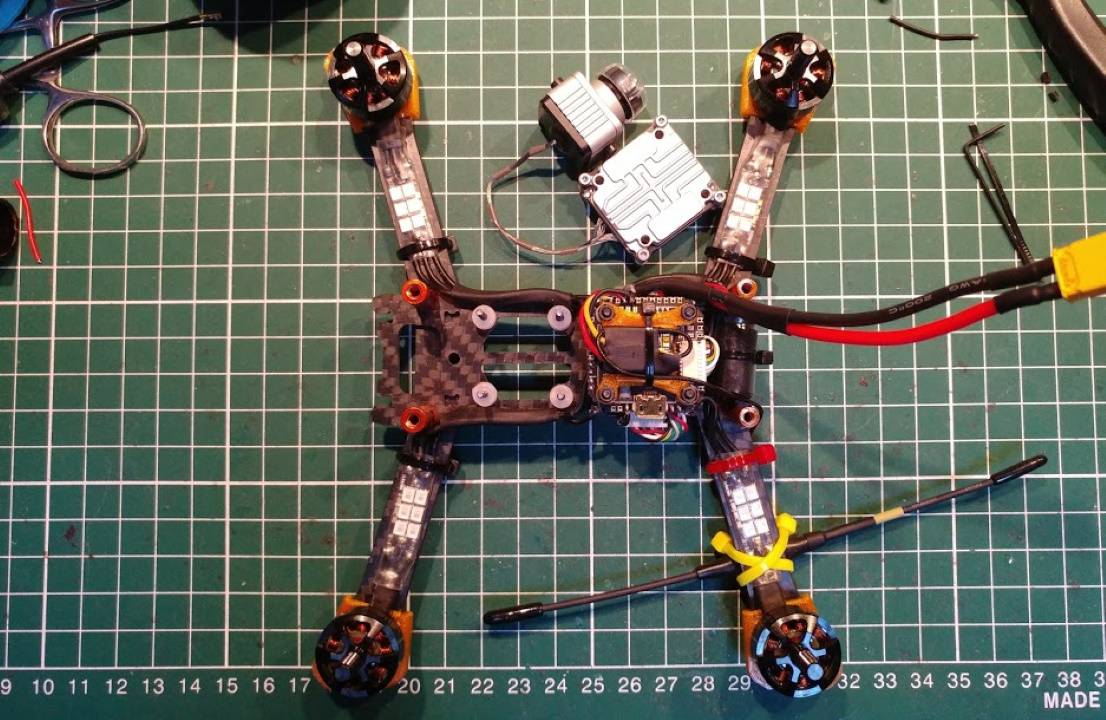
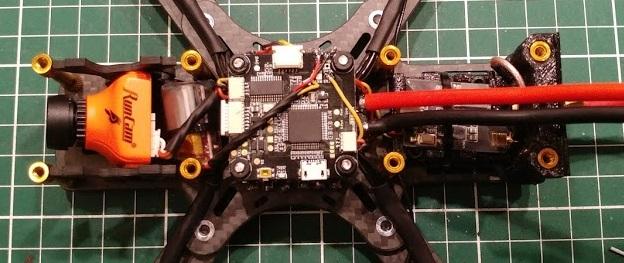
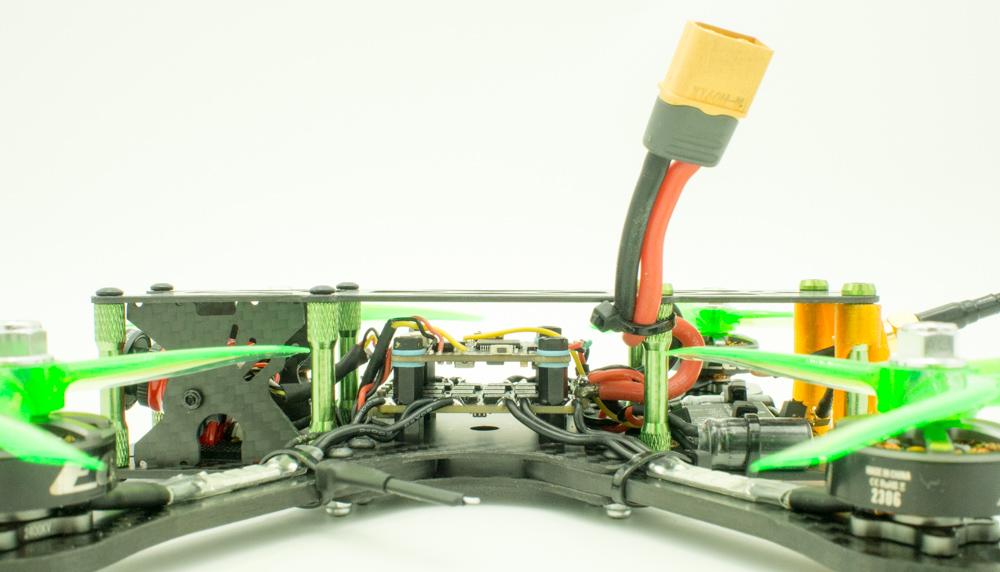
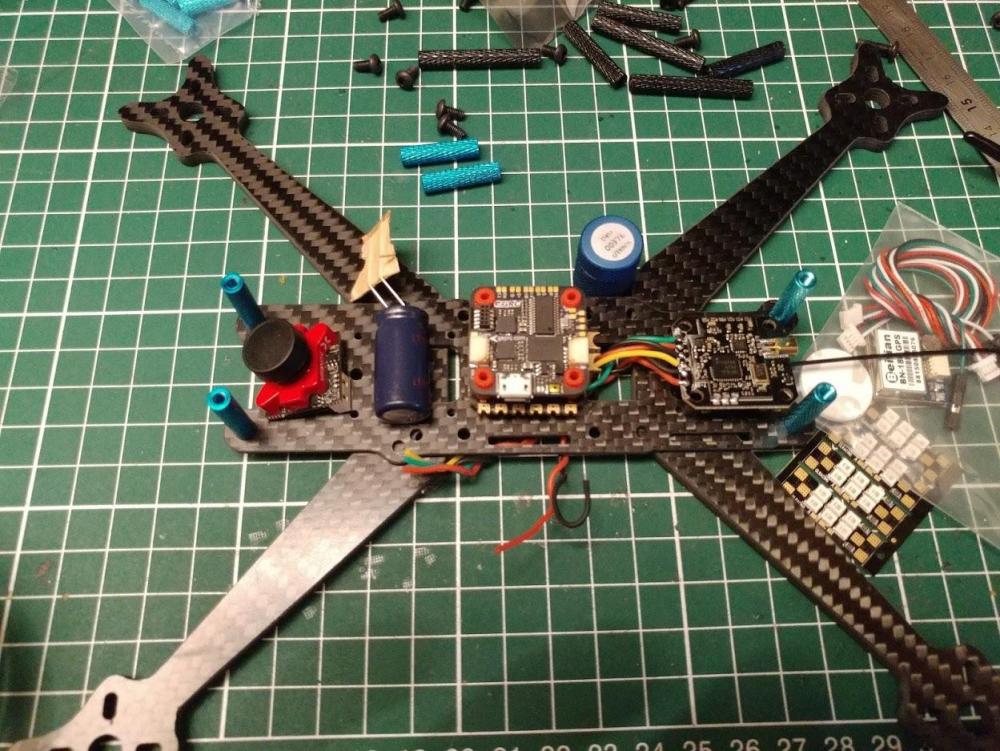
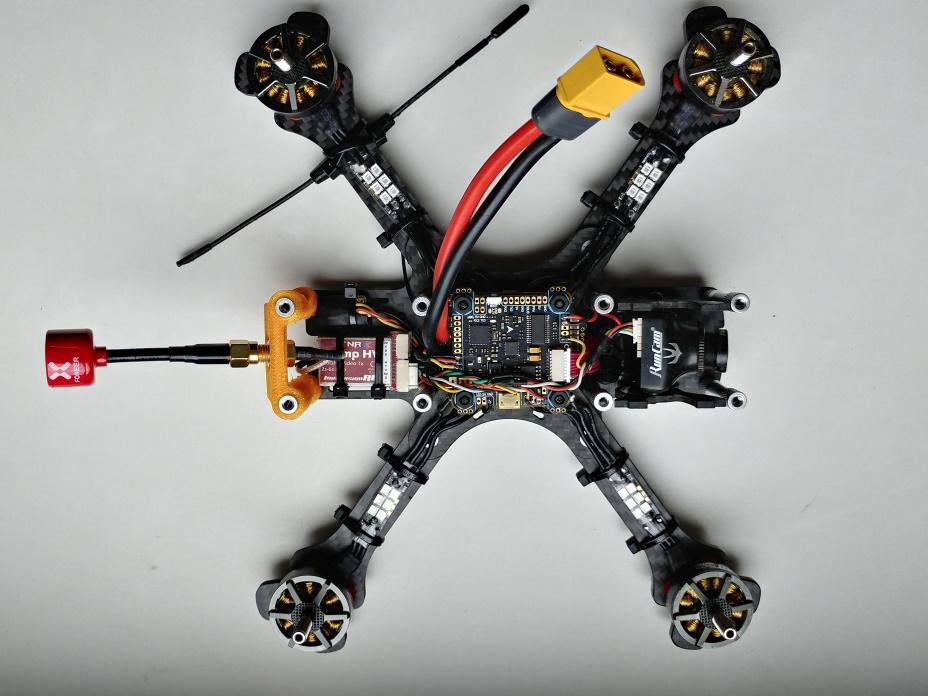
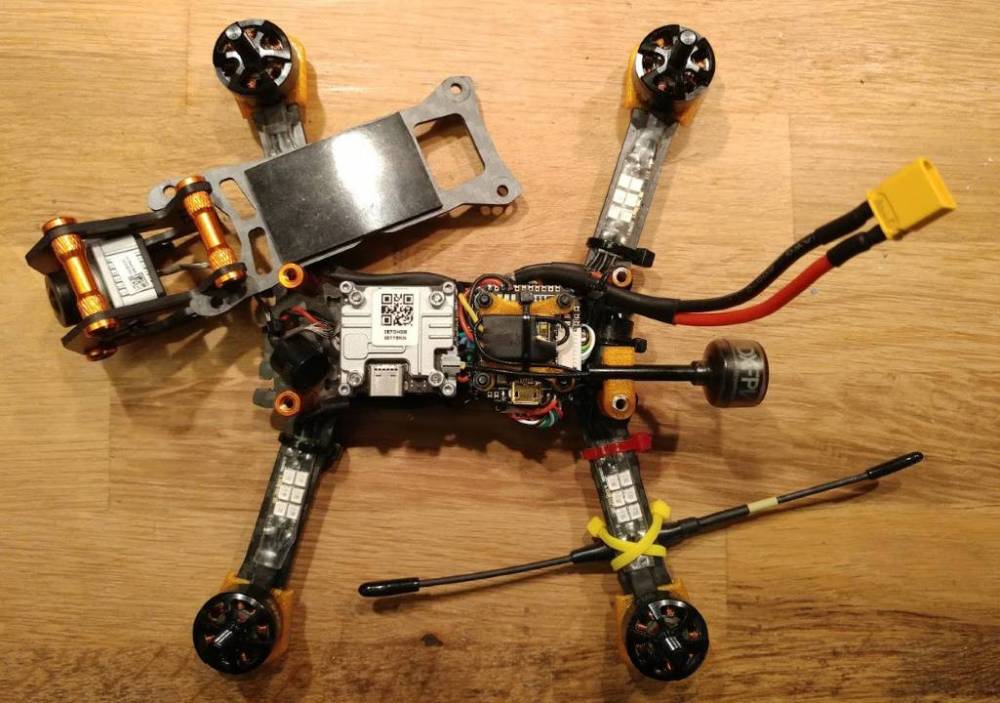
TBS SourceOne v0.2 - Kakute F7
TBS SourceOne v0.2 - Kakute F7Salut tout le monde !
C'est avec plaisir que je vous présente mon premier build
 Je suis toujours très content de mon Tyro99, mais j'avais envie de mettre les mains dans le cambouis.
Je suis toujours très content de mon Tyro99, mais j'avais envie de mettre les mains dans le cambouis.
Comme j'essaie de documenter tout ce que je fais, j'en ai profité pour rédiger un guide, qui je l'espère aidera les apprentis builders à réaliser leur premier build et les plus expérimentés trouveront peut-être quelques infos utiles également. Pour les courageux qui auront le courage de la lecture, n'hésitez pas à me signaler d'éventuelles erreurs ou approximations, ça se passe par ici :
Concevoir son drone : du choix des composants au premier volMalgré le froid et la pluie de ce dimanche, je n'ai pas pu résister à faire un mini maiden, Une heure de caisse pour 10 minutes de vol
 Mais quand on aime, on ne compte pas. Même s'il est partiellement étanchéifié, j'ai préféré ne pas pousser mémé, pour cette première session.
Mais quand on aime, on ne compte pas. Même s'il est partiellement étanchéifié, j'ai préféré ne pas pousser mémé, pour cette première session.
Je le testerai plus sérieusement quand la météo sera plus clémente, il vole, c'est déjà ça

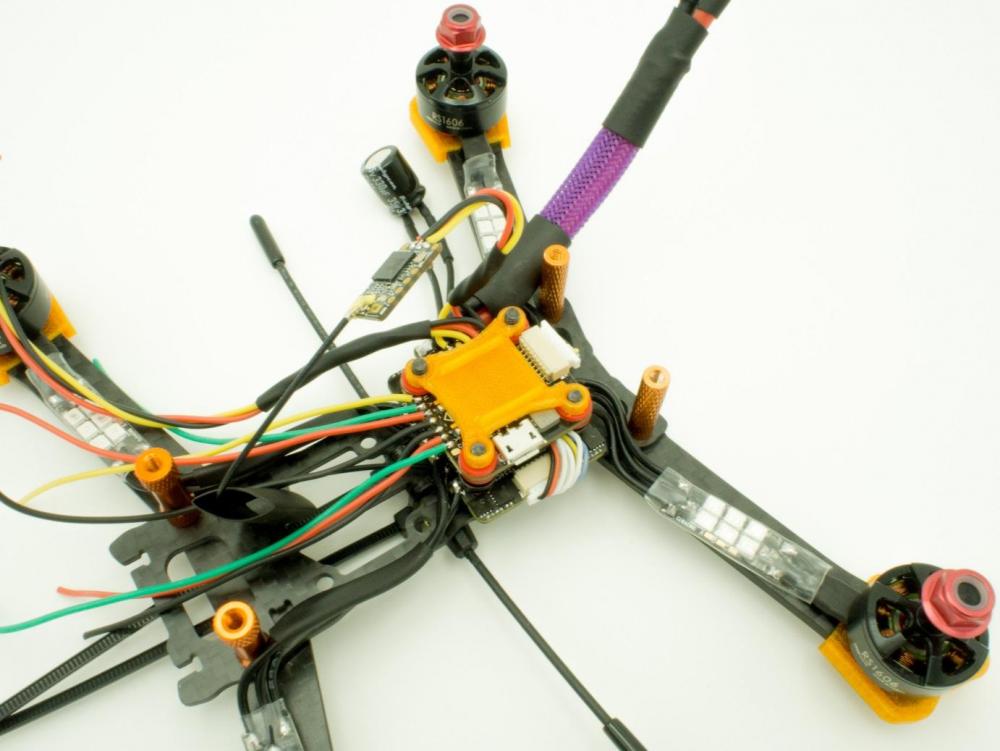
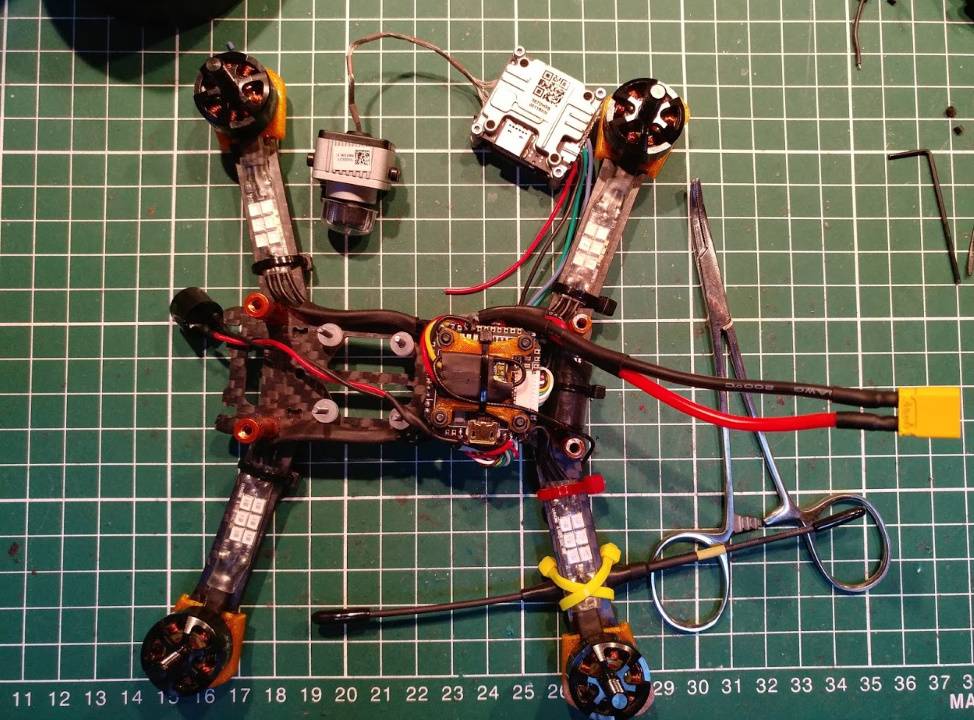
Je pensais avoir fait un bon choix en choisissant une FC avec gyro soft mounté, finalement, c'est assez relou : pour l'étanchéification, il faut le contourner, ça prend de la place en hauteur et surtout, faut vraiment faire gaffe à ce qu'aucun fil ne puisse venir à son contact. Rien de dramatique, juste des contraintes en plus.
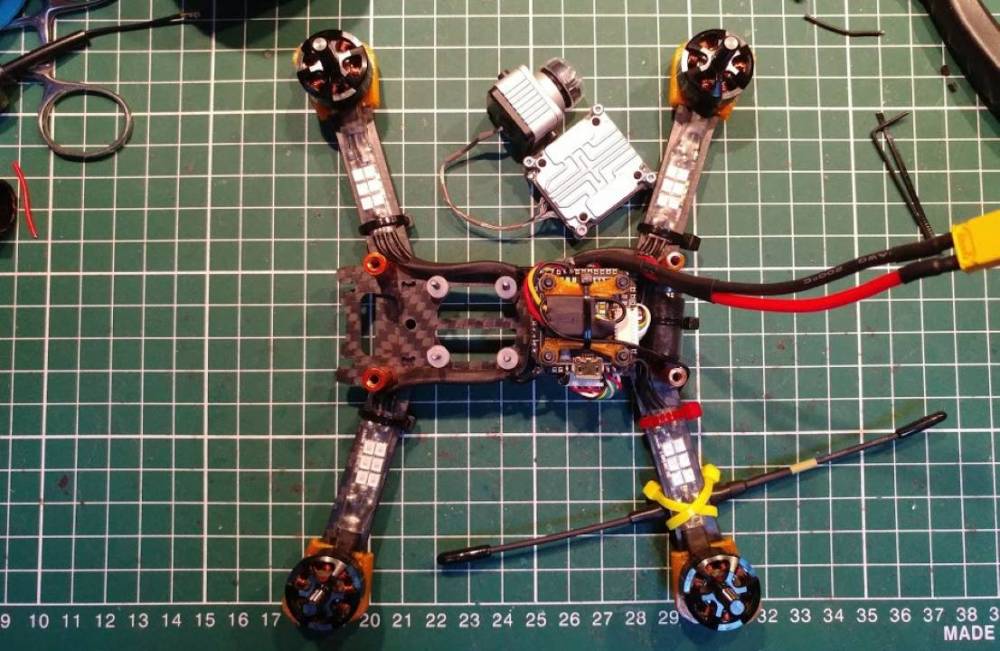
Sinon je suis très content de cette frame à prix raisonnable, seul point sur lequel il faudra que je me penche : en étant tilté à 25/30°, je vois le haut des entretoises et le bout du support de la GoPro sur les bords, c'est très léger heureusement.
Et qu'est-ce que ça tire ces F40 ! Là où je volais sans problème 8-9 minutes avec le Tyro99 (les Azur Power 5150 m'avaient fait gagner une bonne minute!) , avec ce nouveau quad, en à peine 5 minutes c'est plié, sans bourriner, et les chutes de tension sous les 3.5V/cell arrivent vite.
En tout cas, j'ai hâte de le refaire voler pour apprendre à le dompter







POIDS : 430 grammes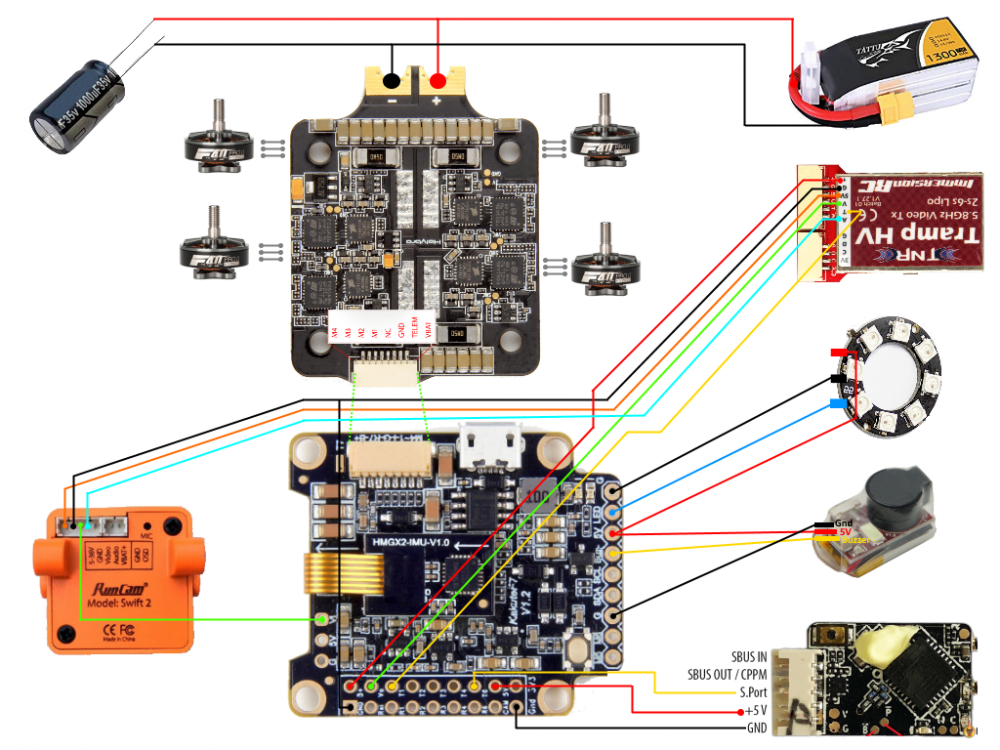
Liste des composants
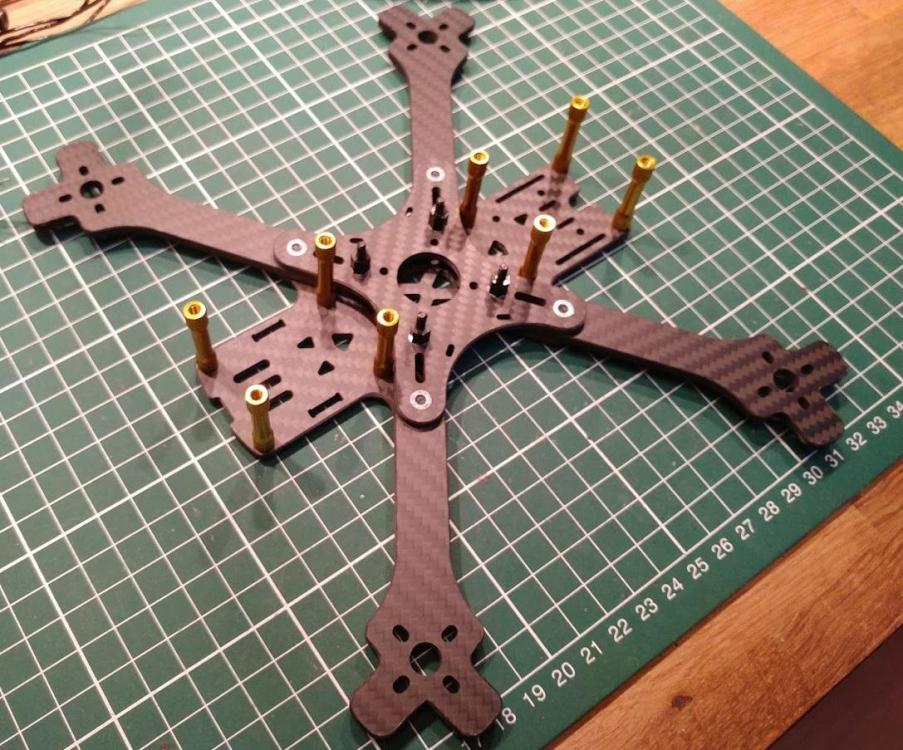
Frame
TBS Source One 5" V0.2 35 € FC
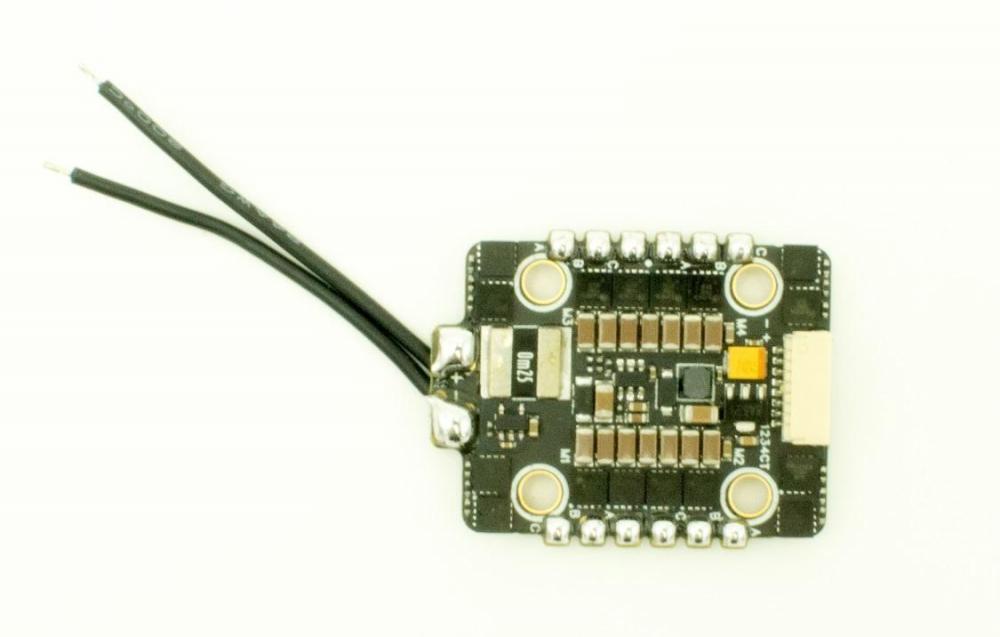
KAKUTE F7 46 € ESCs
1 x TEKKO32 4-IN-1 35A ESC 56 € Moteurs
4 x T-MOTOR F40 PRO II - 2400KV 84 € Jeu d'hélices
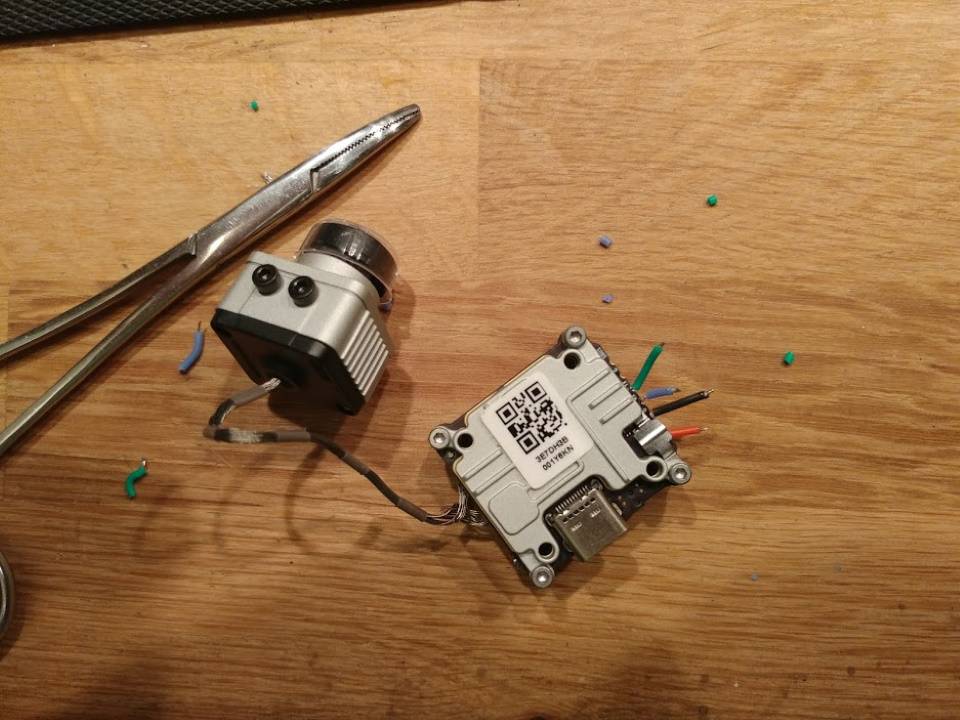
1 x DALPROP CYCLONE T5046C 2 € Caméra FPV
Caméra FPV RunCam Swift 2 (2.3 mm) 42 € Émetteur vidéo
IMMERSIONRC TRAMP HV 31 € Antenne vTx
ANTENNES TRIUMPH SMA 5.8GHZ RHCP TEAM BLACKSHEEP (TBS) 20 € Récepteur radio
FRSKY R-XSR (EU-LBT) 21 € LiPo
CNHL - 1500MAH 4S 100C G+PLUS Prix total : 337 €
-
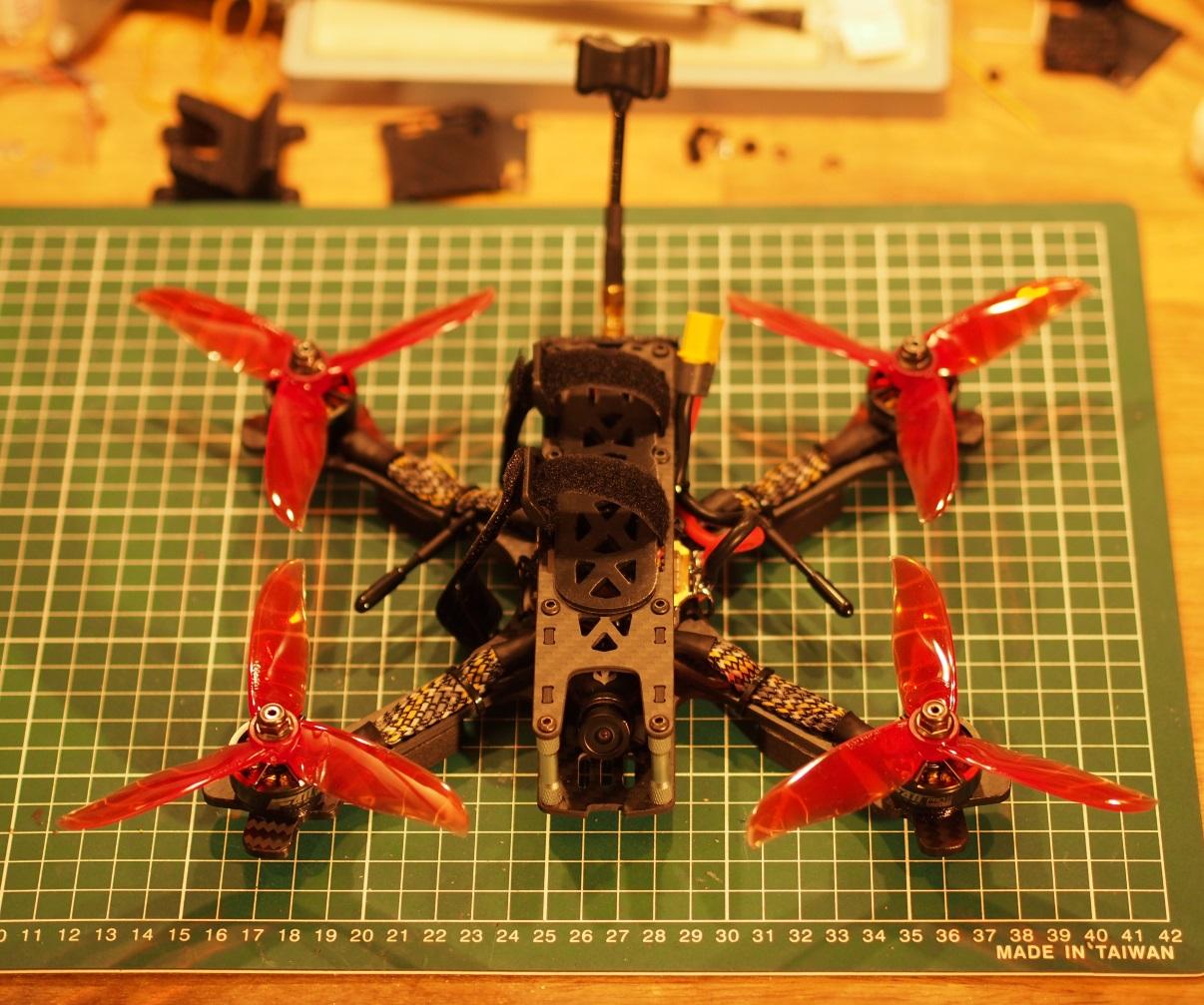
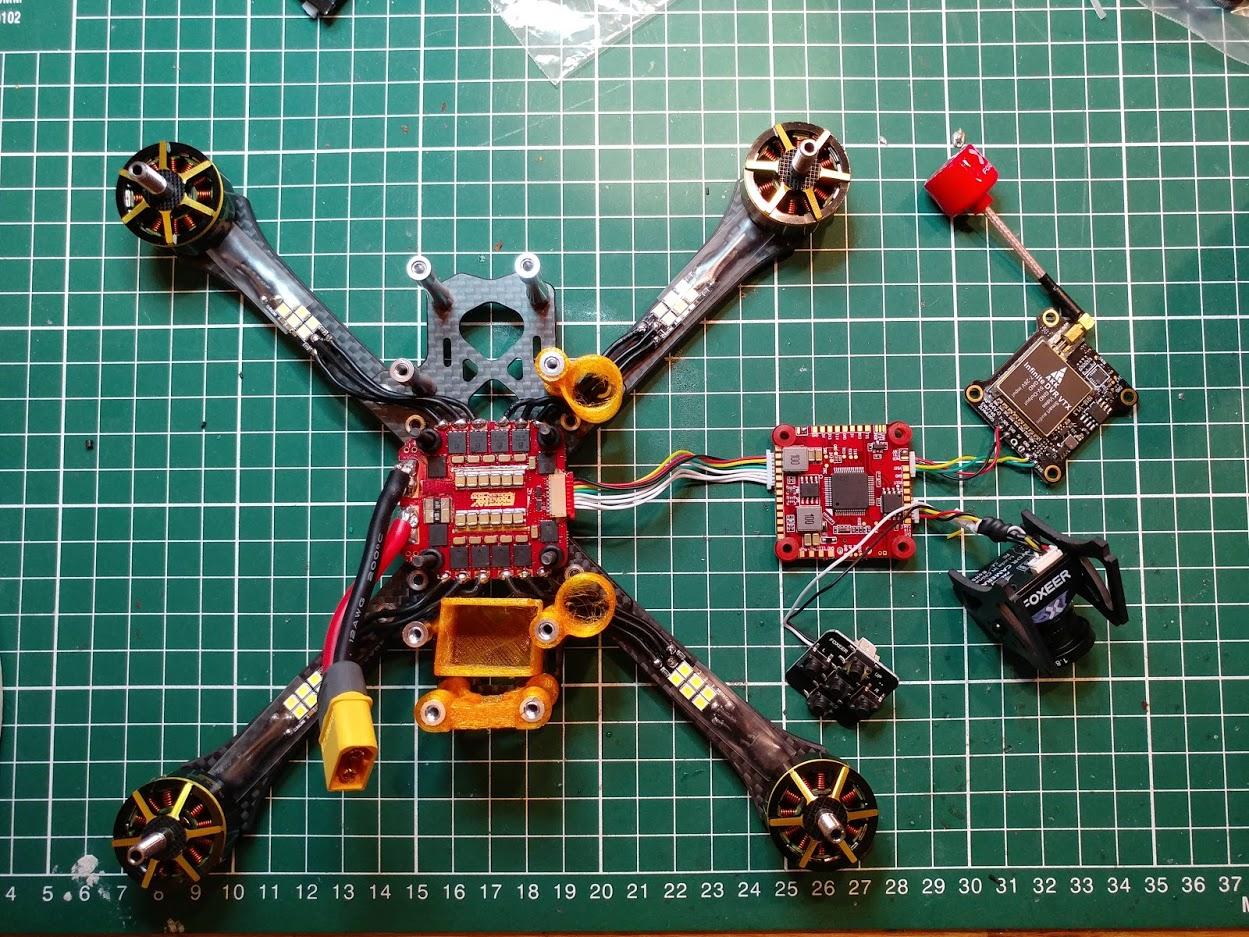
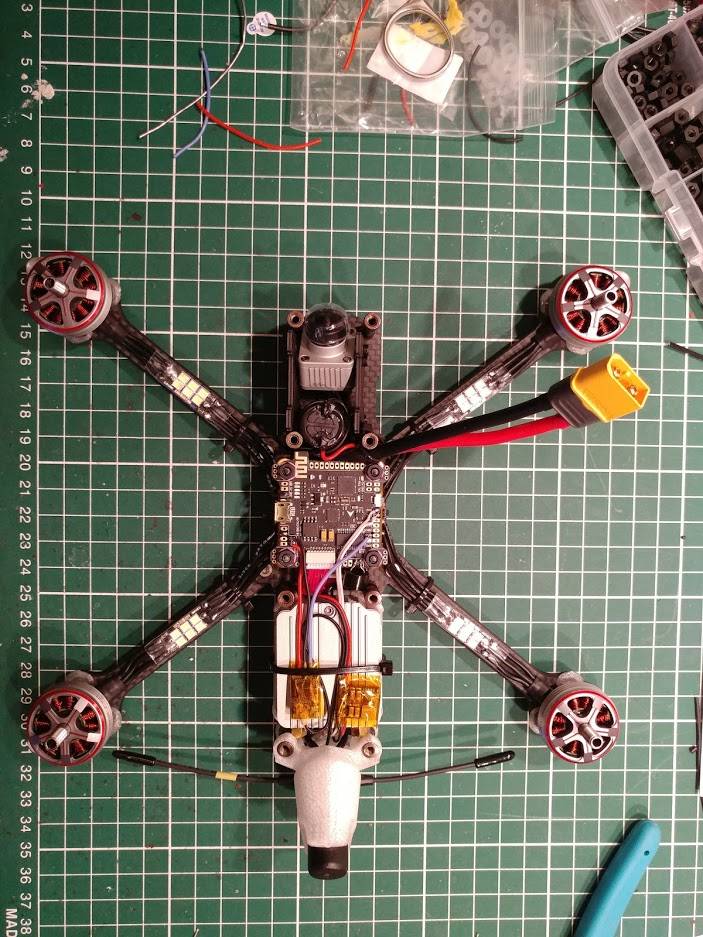
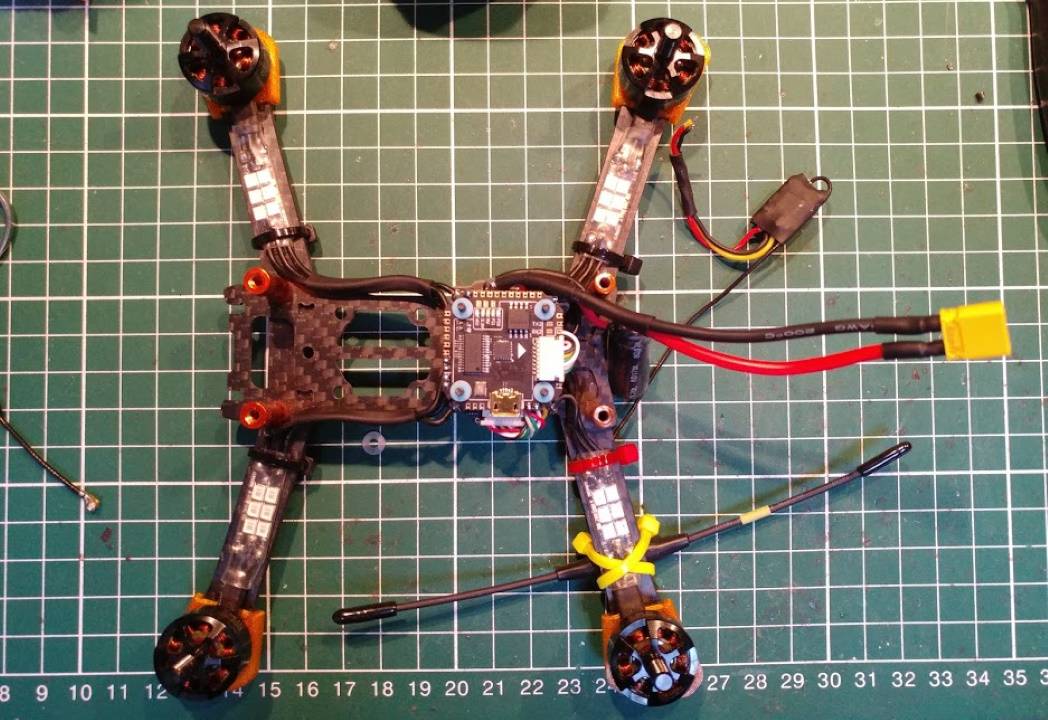
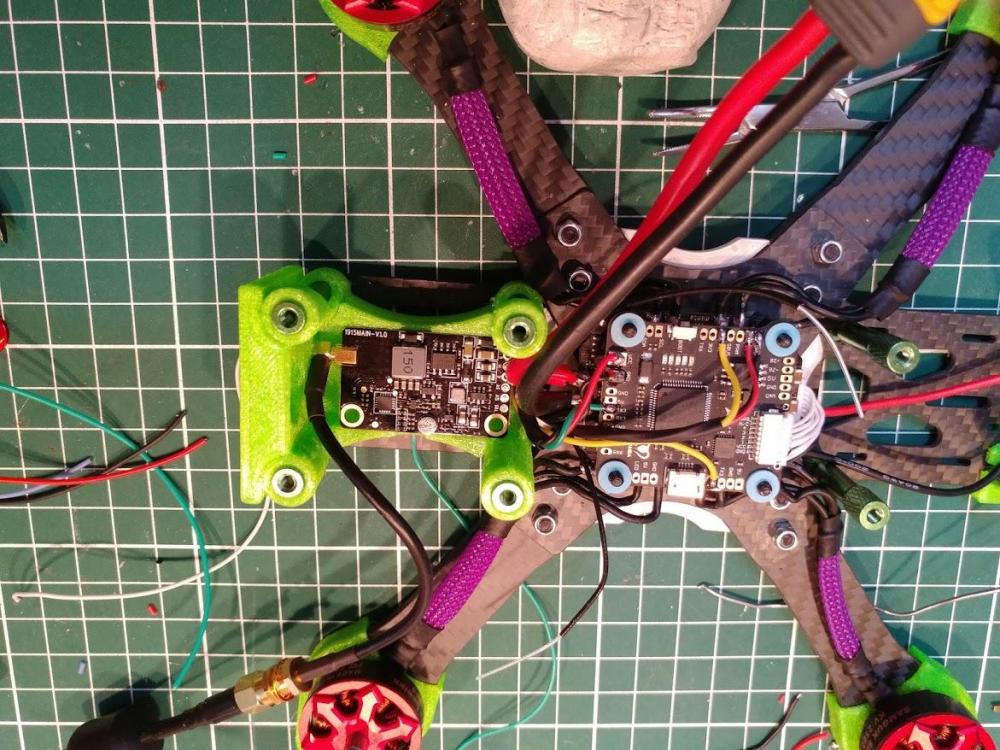
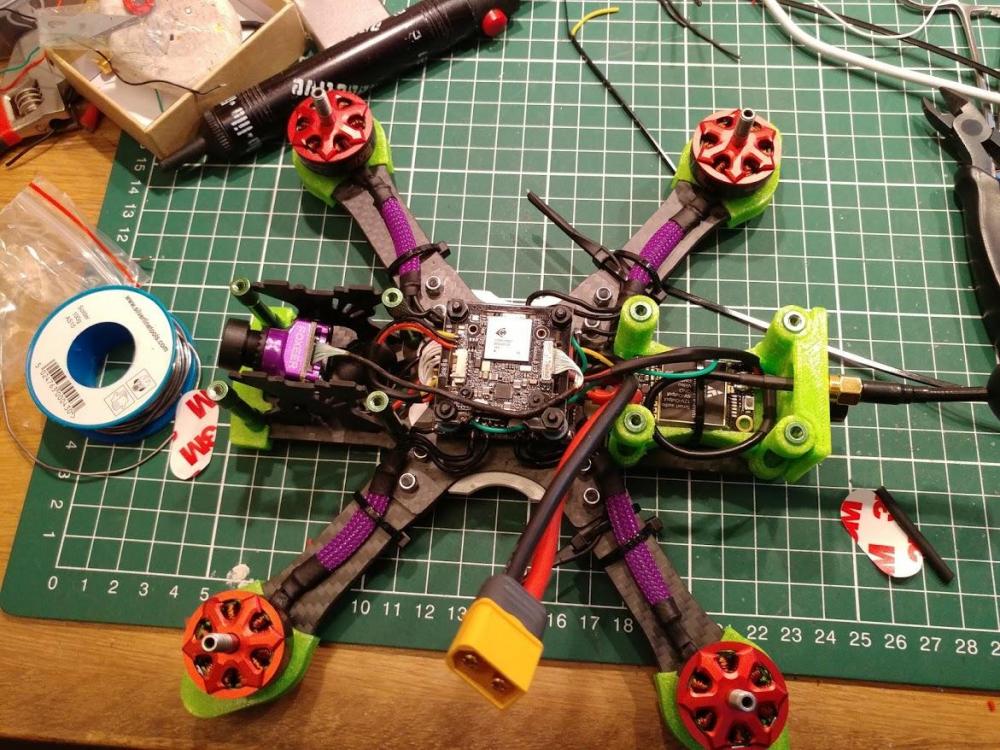
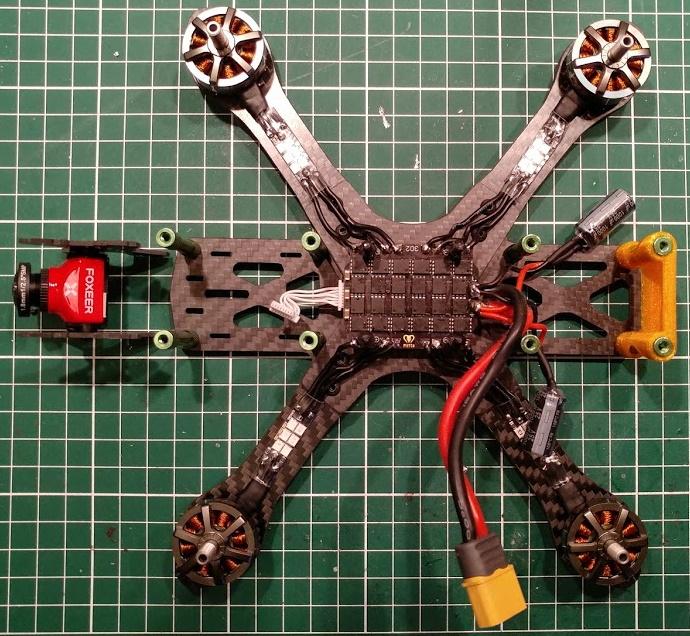
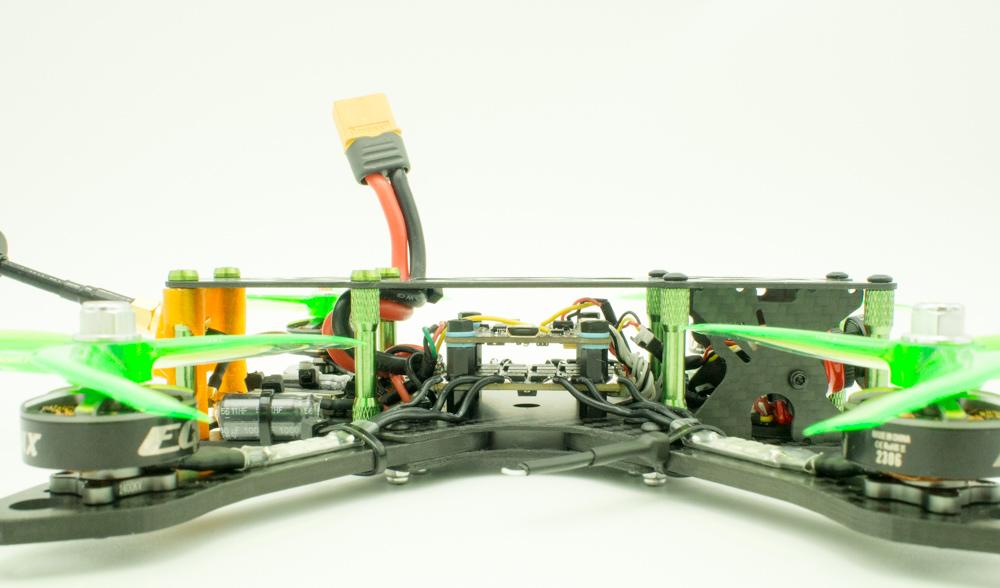
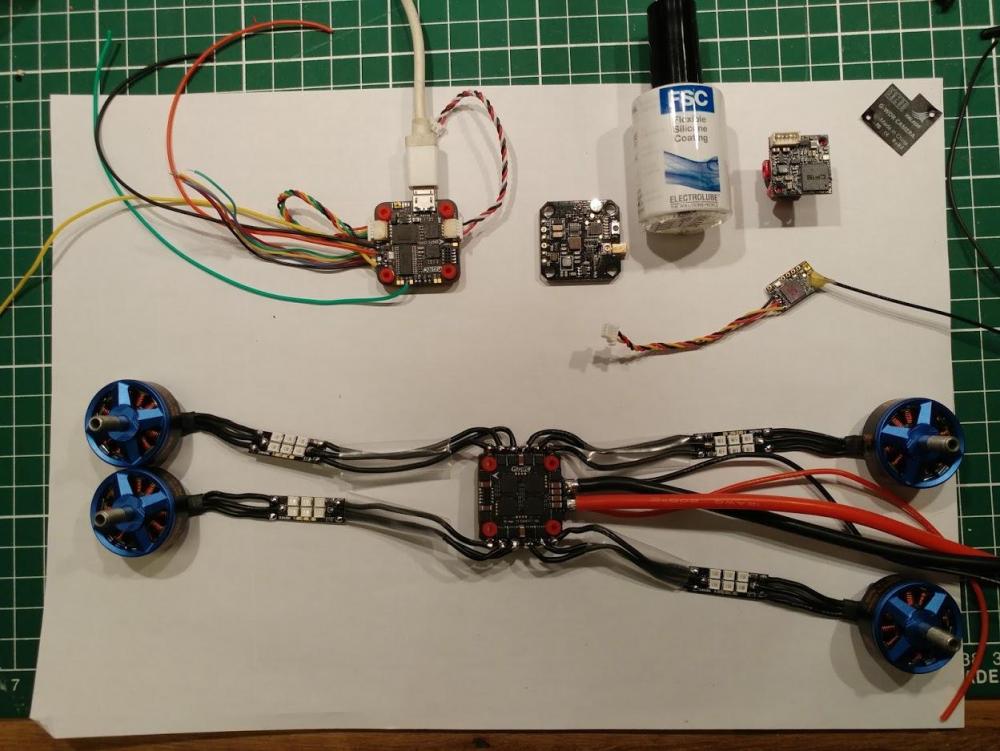
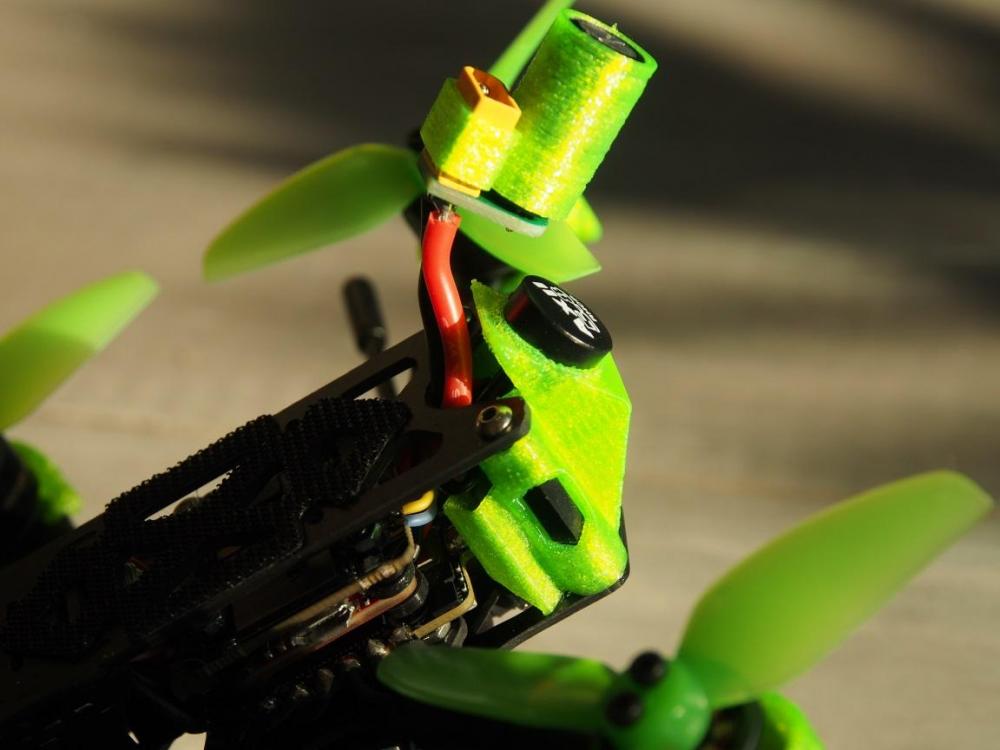
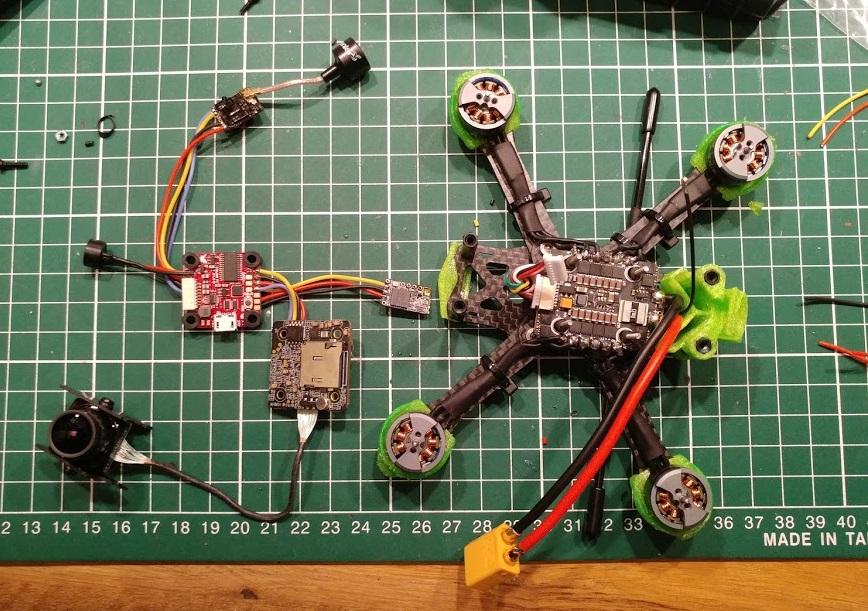
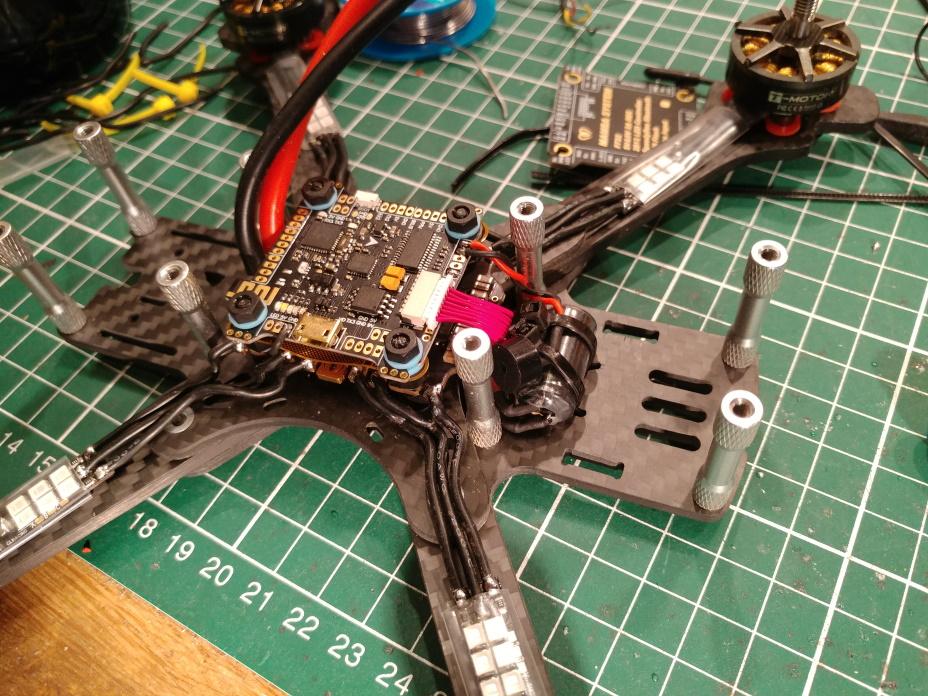
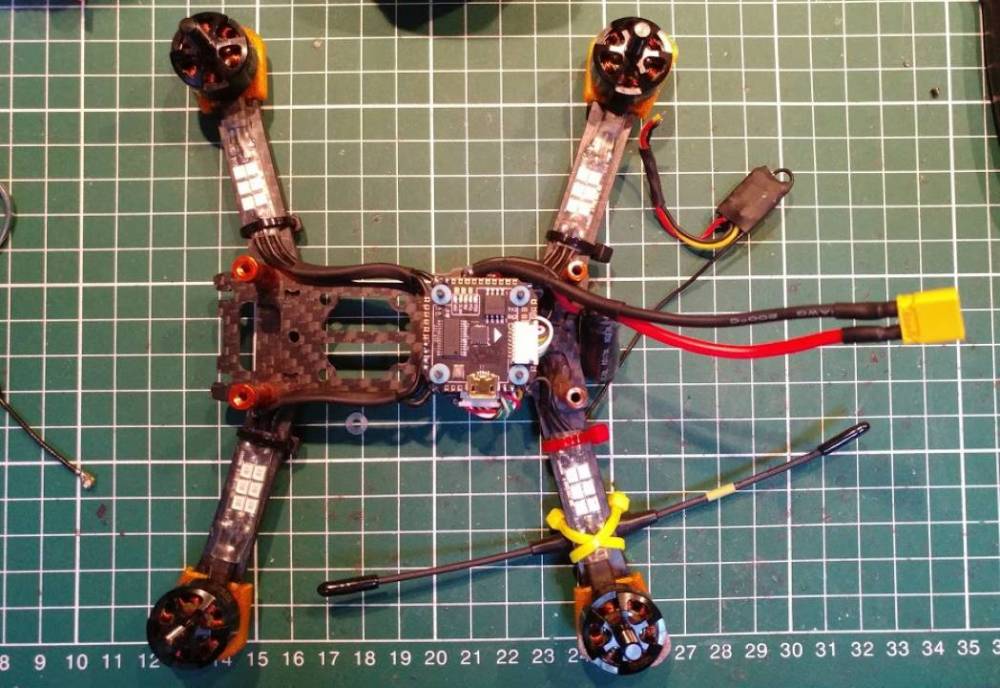
Martian 215 HD - on a budget
Martian 215 HD - on a budgetHello,
Ce n'est pas exactement mon build mais celui de mon frère. J'ai sélectionné les composants pour son budget et ensuite je l'ai mis au boulot pour qu'il découvre les joies de la soudure (et surtout qu'il gagne en autonomie et moi en tranquillité
 ).
).
Il avait un budget serré et voulait pouvoir faire des vidéos correctes. Donc on est sur des composants pas trop chers, pas hyper récents mais assez populaires dans leur gamme de prix. La caméra FPV/HD représente à elle seule plus du tiers du prix du quad.
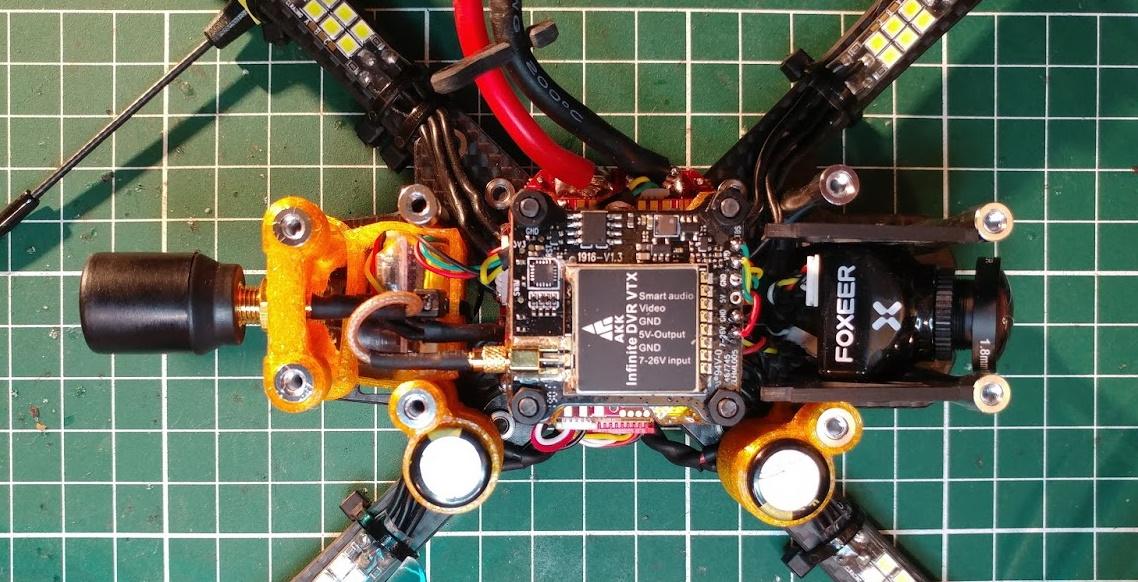
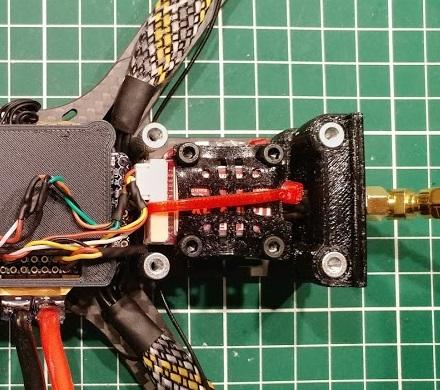
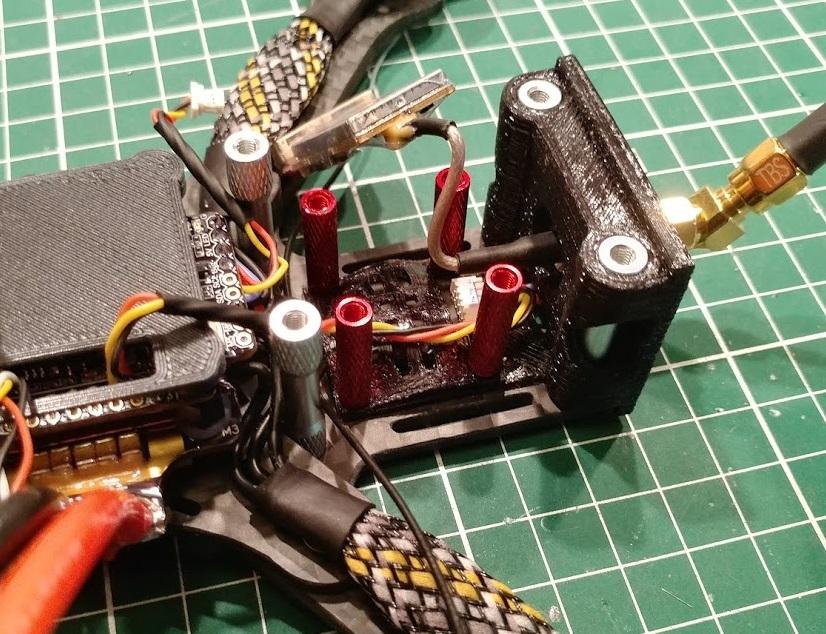
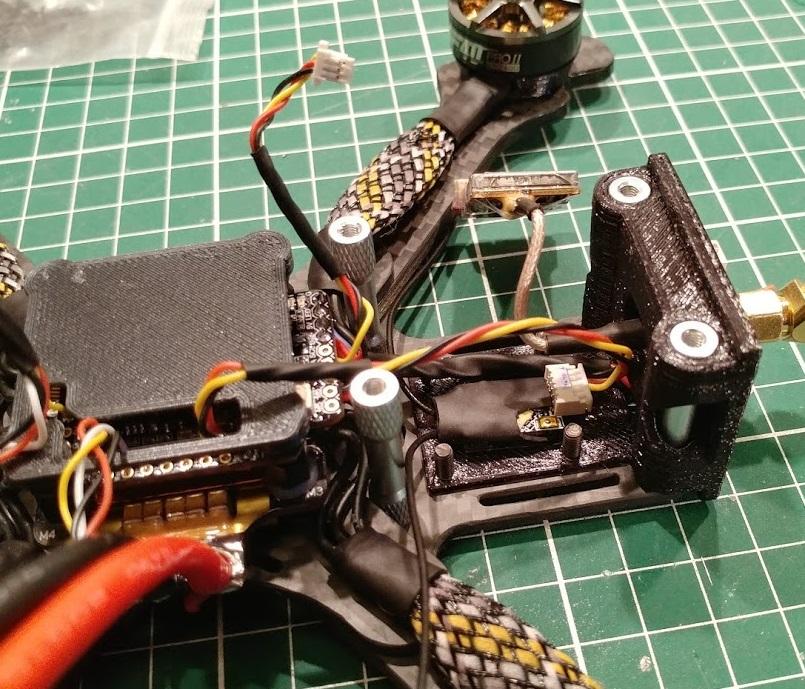
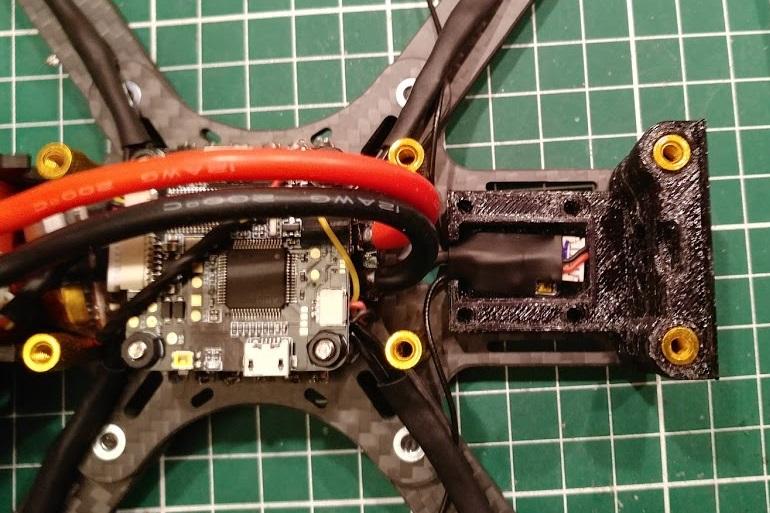
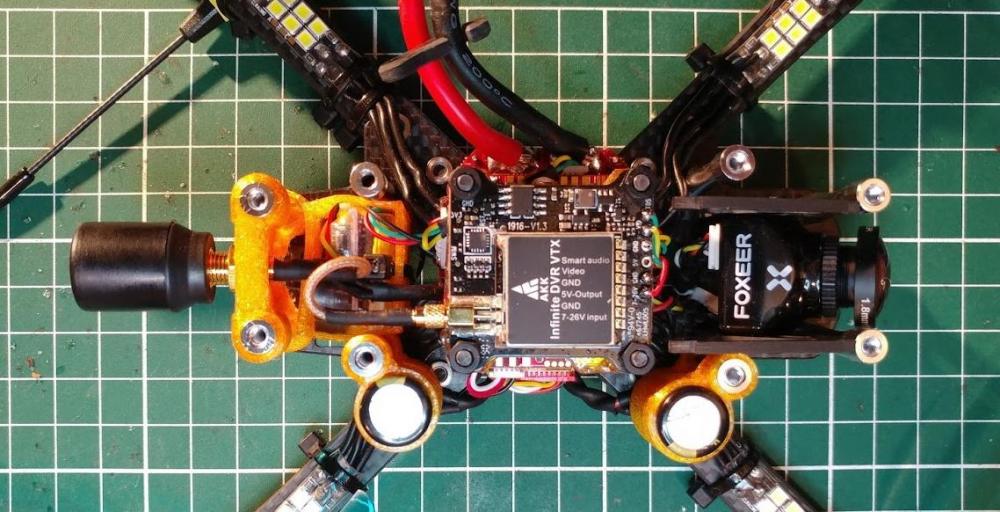
J'ai fait quelques supports customs pour la partie arrière (RX + VTX + antenne + Leds/buzzer). Les bras sont protégés et les moteurs softmountés sur ces protections.
Le R-XSR est en F.Port. C'est la première fois que je faisais ça sur une F4, et la petite soudure se fait très bien.
Voici une vidéo du pseudo maiden (c'est bien le premier vol, mais il a été édité pour voir ce que l'on pouvait tirer de la Foxeer Mix).
Je ne l'ai pas encore essayé, mais mon frère en est super content, il va laisser son Tyro au placard



POIDS : 435 grammes
Liste des composants
Frame
Realacc Martian 215 16 € FC
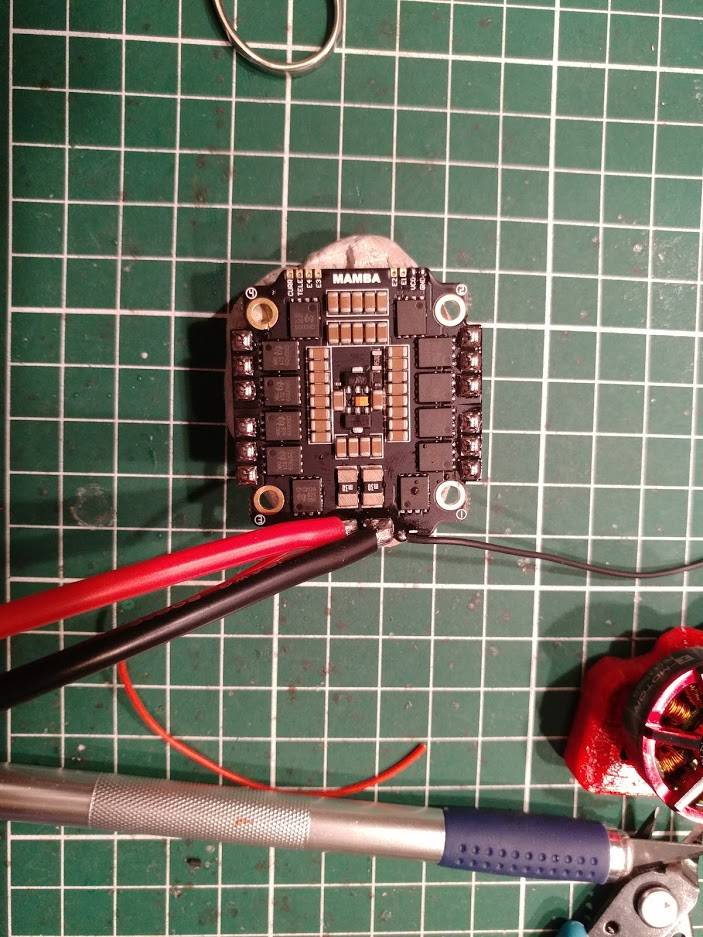
MAMBA F405 Betaflight Flight Controller 18 € ESCs
1 x ESC Mamba F40 4en1 30.5x30.5 DSHOT600 18 € Moteurs
4 x DYS Samguk Series Shu 2306 2500KV 32 € Jeu d'hélices
1 x Dalprop Cyclone Series T5046C 2 € Caméra FPV
Foxeer Mix Mini Camera HD 70 € Émetteur vidéo
AKK FX2 Ultimate Mini International 5.8GHz 40CH 25mW/200mW/600mW/1000mW 17 € Antenne vTx
Realacc UXII 5.8G 1.6dBi RHCP 6 € Récepteur radio
FrSky R-XSR 22 € LiPo
CNHL - 1500MAH 4S 100C G+PLUS Prix total : 201 €
-
Tyro SourceOne
Tyro SourceOneSalut,
J'avais plein de spare pour mon Tyro99 à la retraite (un tyro entier en spare en fait
), alors j'ai suivi l'exemple de We Are FPV avec le leur. Et j'avais besoin d'un 5" de secours capable d'embarquer facilement une GoPro.
Il s'agit donc d'un quad tout en spare, j'ai juste repris une TBS Source One à 30€. Bref, rien de fou, il vole pas trop mal, il est solide, ça fera l'affaire en backup pour les vacances
Il est sous Betaflight 4.0 et le R-XSR en F.Port.
Au premier vol, les alertes de tension sont arrivées très vite, finalement, le capteur de tension embarqué n'est pas bien étalonné (0.3V de décalage !), donc rien de méchant, ça se corrige en 2 secondes. C'est un truc que je n'avais jamais vérifié dans mes builds, ça va atterrir dans ma checklist pour les prochaines fois.
Pour le prix, j'ai mis celui du kit (sur la FC), le kit entier étant moins cher que les moteurs, la FC, les ESCs et le VTX au détail.
Un petit extrait du maiden :


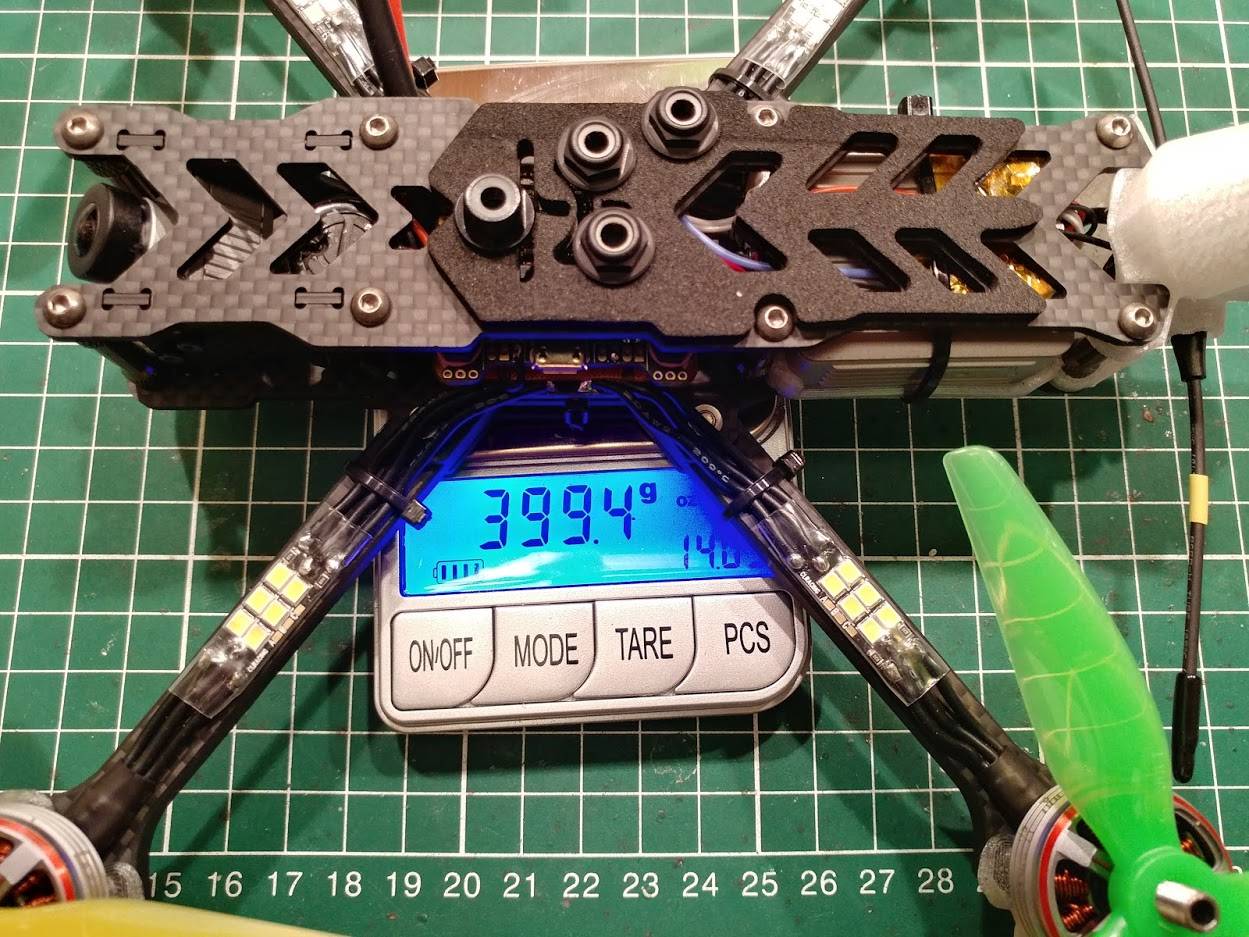
POIDS : 400 grammes
Liste des composants
Frame
TBS SourceOne v0.2 33 € FC
FC du Tyro : F4 Flight Controller OSD LC Filter 88 € ESCs
1 x ESCs du Tyro : 4 IN 1 30A BLHeli_S ESC 2-5S Moteurs
4 x Moteurs du Tyro : 2206 2150KV 3-5S Brushless Motor Jeu d'hélices
1 x Azur Power Johny 3 € Caméra FPV
RunCam Sparrow WDR 21 € Émetteur vidéo
VTX du Tyro : 5.8G 40CH 0mW/25mw/200mw/600mw switchable VTX Antenne vTx
Realacc Pagoda RHCP Antenna 65mm 5.8G 3 € Récepteur radio
FrSky R-XSR 22 € LiPo
CNHL - 1500MAH 4S 100C G+PLUS Prix total : 170 €
-
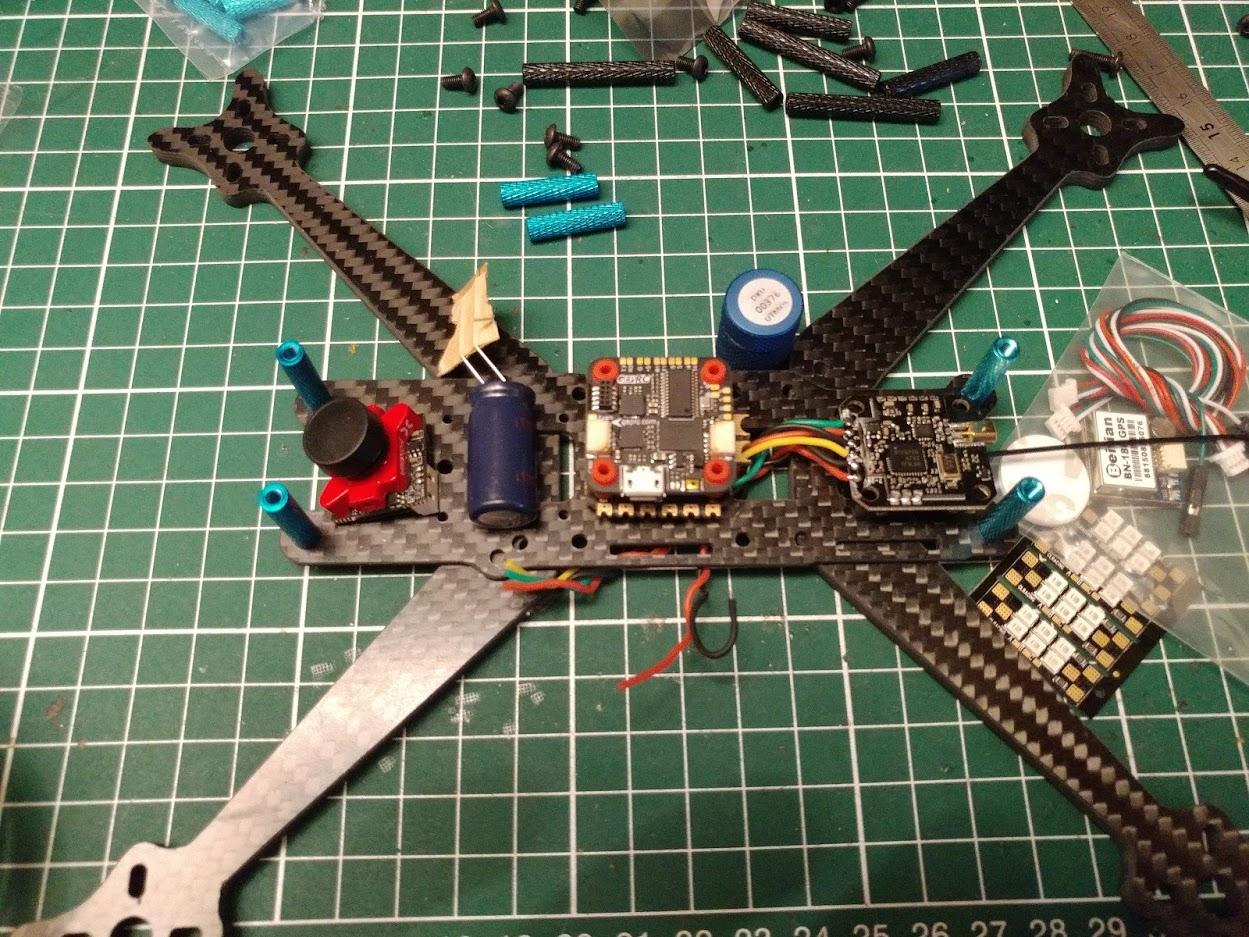
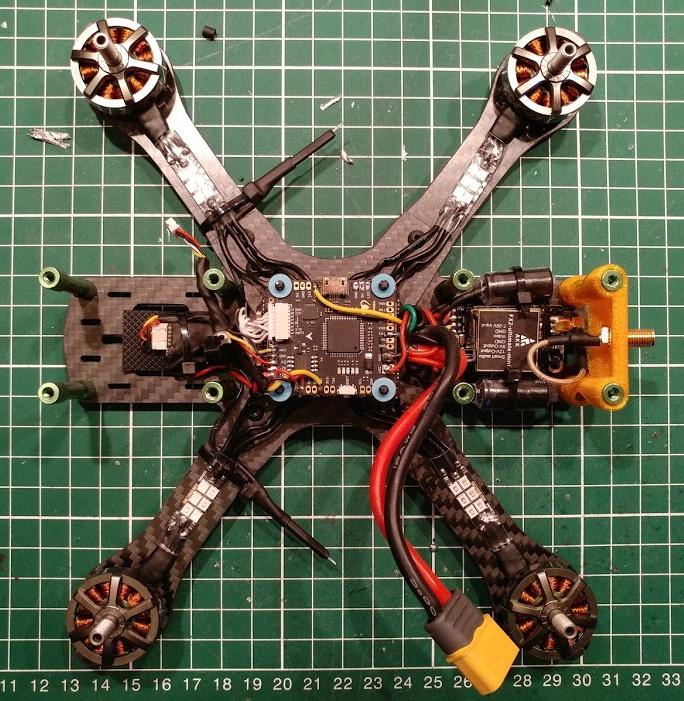
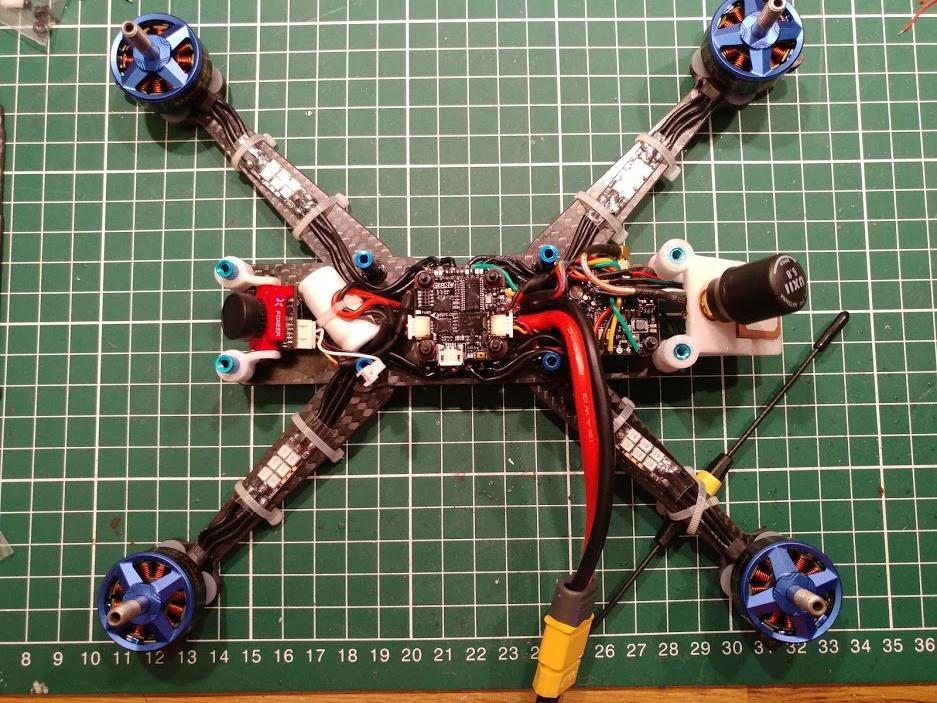
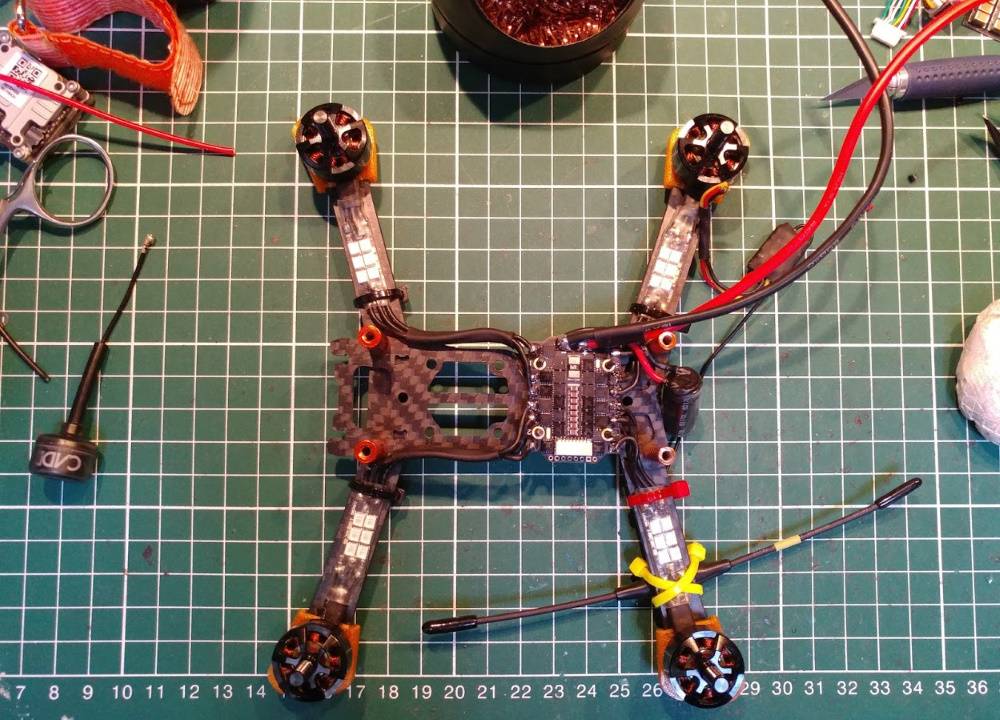
Le quad du pauvre, le retour ;)
Le quad du pauvre, le retour ;)Hello,
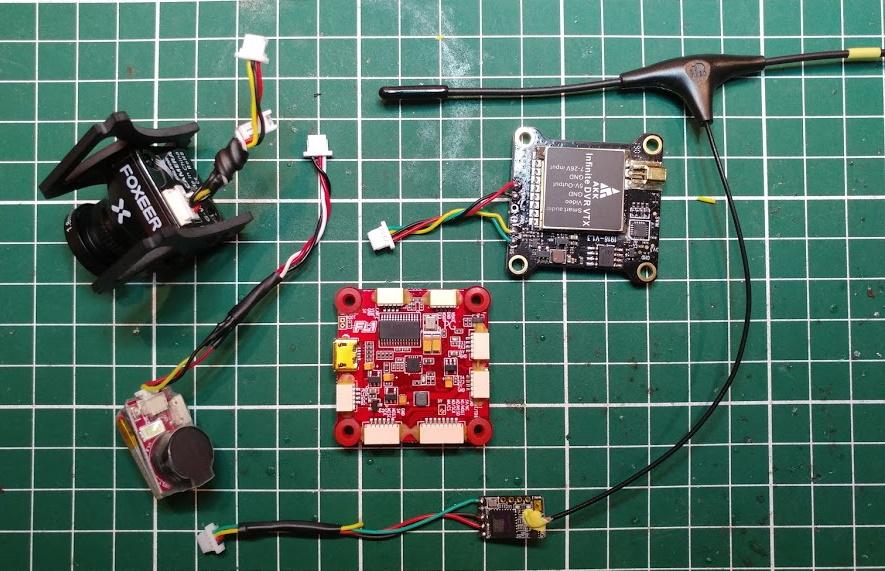
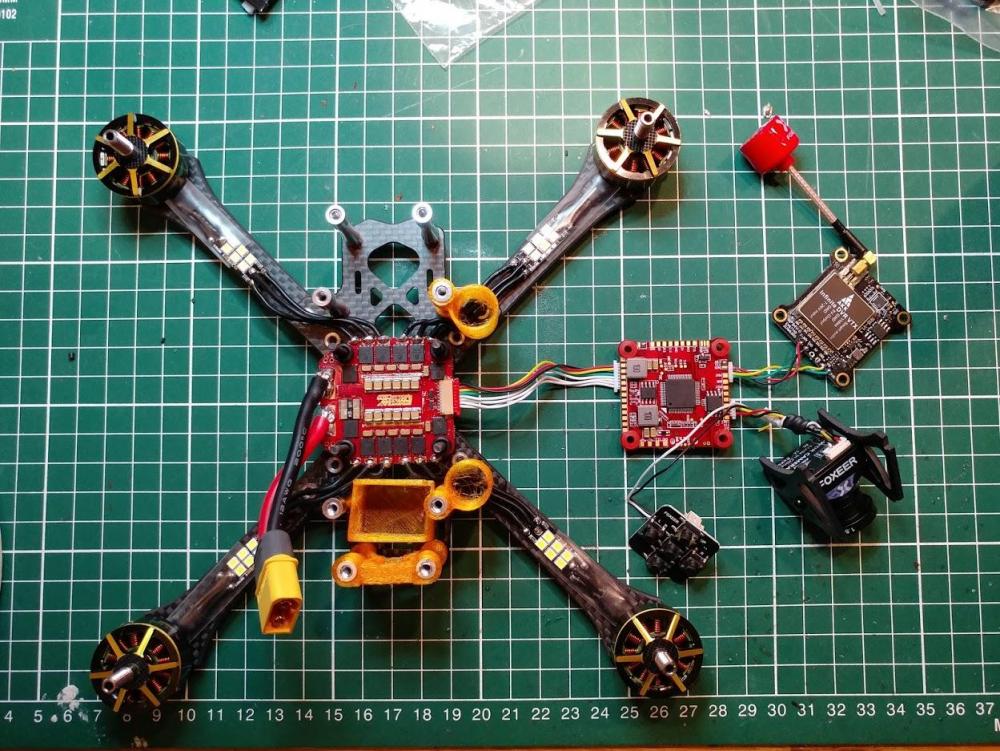
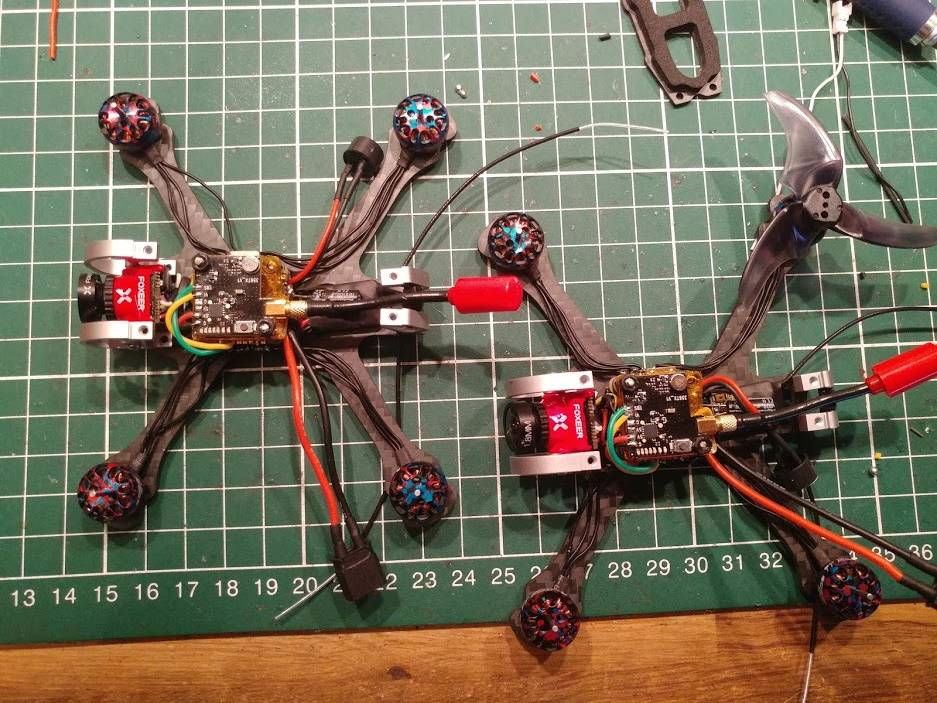
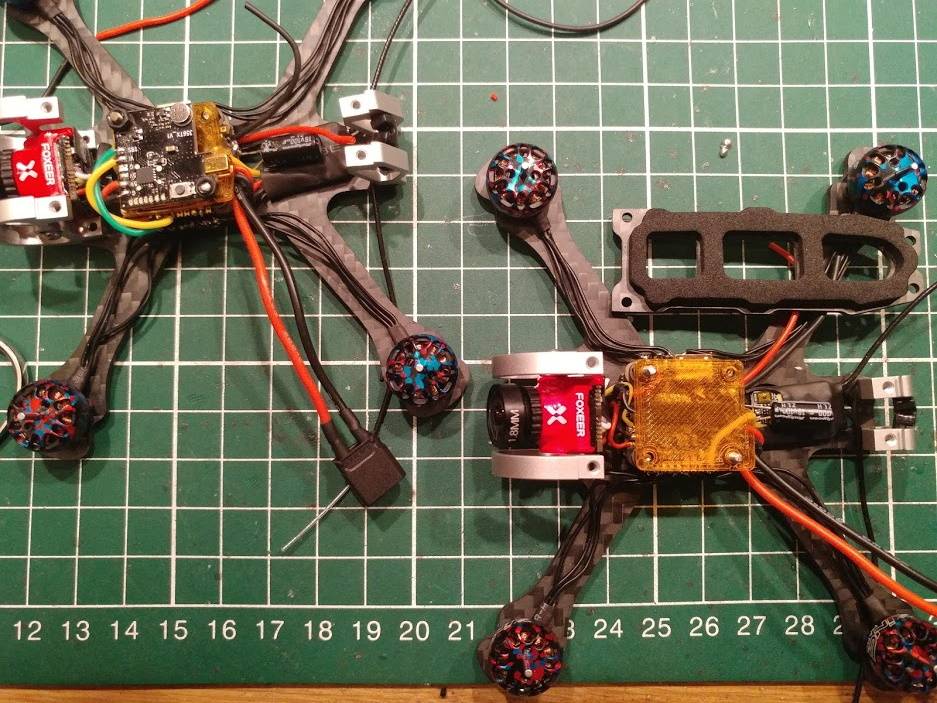
Derrière ce titre totalement provoc', se cache en fait une évolution du build qu'on avait fait pour mon frère :
J'ai eu l'occasion de le refaire voler récemment, et j'ai été traumatisé : une brique parkinsonienne
Alors est-ce que les moteurs ont pris de gros pains, est-ce que le montage n'avait pas été hyper bien fait (FC trop serrée), est-ce que mon niveau d'exigence a évolué... certainement un peu de tout ça !
C'était donc l'occasion de tout démonter/remonter plus proprement avec quelques upgrades/modifs pour avoir une machine qui vole bien, plus légère, avec un meilleur flux FPV et qui coûte encore moins cher.
Comme d'habitude, avant de rentrer un peu plus dans les détails, voici une petite vidéo du maiden, j'ai inclus quelques secondes de l'horreur précédent l'upgrade
D'habitude je pilote avec une X9D, là j'ai utilisé la QX7 de mon frère, j'ai donc fait ce que j'ai pu : je trouve la course des sticks hyper longues pour mes petits pouces Le quad est en PIDs stocks, mais le filtrage a été fortement réduit et j'ai appliqué une partie des recommandations des Tuning Notes pour le Freestyle (c'est la dernière version de BF, la 4.0.6). C'est filmé avec une Runcam 5, contrairement à ce que la luminosité peut laisser penser, il faisait très sombre (20h + nuages), d'où l'impression d'un surplus de filtre ND.
C'est en faisant qu'on apprend, et mes 2 derniers builds (Flosstyle et Xbee 230) m'ont appris beaucoup de choses. J'ai réalisé que j'avais fait pas mal de conneries sur d'autres builds, ou du moins que j'aurais pu mieux faire. Ça risque de paraître évident pour beaucoup, mais ça sera utile aux débutants : il faut en permanence garder en tête d'obtenir un quad sain. C'est vraiment la base : il nécessitera très peu de filtrage, et qui dit moins de filtres, dit meilleure réactivité et donc moins de propwash. Le tuning s'en trouve également grandement simplifié.
Donc un quad sain, c'est un quad dans lequel les vibrations en général et plus particulièrement celles qui atteignent le gyro sont le plus réduites possible. C'est aussi un quad dans lequel le bruit électronique sera minimisé et où l'on fera attention aux potentielles perturbations électromagnétiques générées par les différents composants électroniques ainsi que par les fils et antennes. Ça mériterait un article plus complet, j'ai commencé à m'y coller, je le partagerai si le résultat final me convient
Bref, revenons à cet update, voici la liste des évolutions :
- Il a maintenant une Runcam 5. Donc exit la Foxeer Mix qui est remplacée par une Falkor 2 : une meilleure image FPV, un meilleur FOV et un gain de poids/place. Du coup, il n'y a plus rien au dessus de la FC !
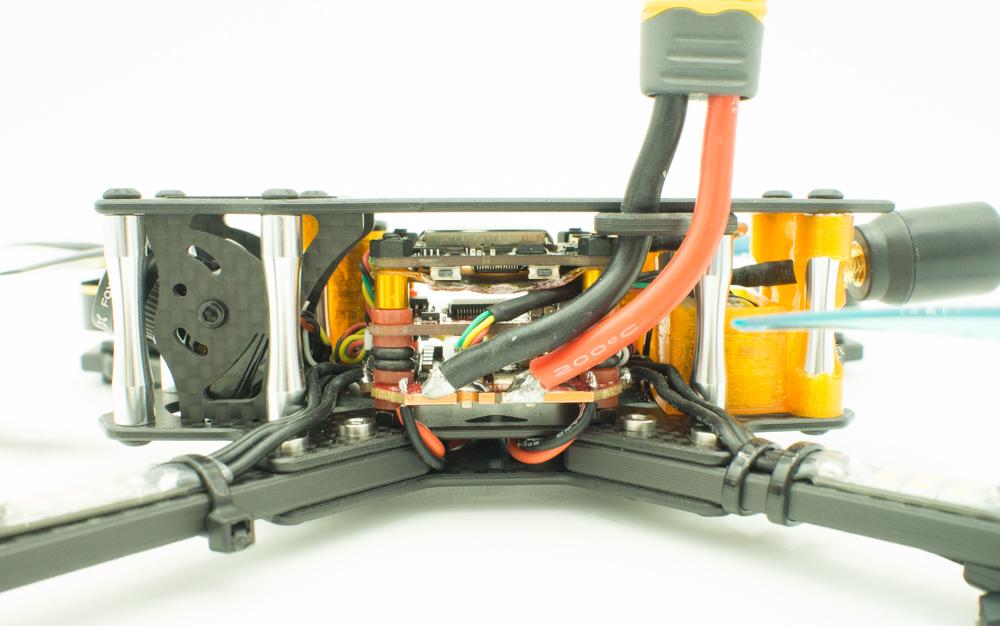
- Ajout d'un second condo de 1000µF pour avoir un signal vidéo vraiment clean (cf. DVR au début)
- La FC n'est plus serrée par des écrous mais simplement bloquée pour laisser les gummies faire leur taf de découplage/absorption des vibrations au mieux
- Remplacement des moteurs DYS Samguk par des Emax Eco Series 2306 2400Kv qui ne coûtent pas plus cher et sont d'une qualité d'un autre niveau. J'ai hésité avec les nouveaux DYS Sun-Fun 2207 en 2750 Kv, finalement j'ai préféré aller sur du Emax, tant pis pour les hauts Kv.
- Softmounts des moteurs virés
- J'ai dégagé pratiquement tout le TPU, à part pour le support SMA. Aujourd'hui je privilégie le poids à la protection sans la moindre hésitation.
- La frame reste la Martian 215 pour des raisons de budget et parce qu'il en avait une en spare. Si c'était à refaire, je prendrai une autre frame, celle-ci est lourde, inutilement haute, pas spécialement robuste (même s'il n'a jamais rien cassé), et les bras sont un poil courts, ça peut être délicat avec certaines hélices.
- Le fait d'avoir gagné un étage dans la stack principale permet de mieux espacer la FC et les ESCs. Et terminé les fils baladeurs au dessus du MCU.
- Le RX à migré à l'avant, pour l'éloigner du VTX et de la pigtail.
-
La barre de LEDs a dégagé et est remplacée par des RaceWires, on gagne en poids, en fils, en temps CPU et le remplacement des moteurs s'en trouvera facilité à l'avenir
- J'ai gardé son AKK, mais dans la liste des composants, j'ai recommandé un Eachine qui est moins cher et a pratiquement les mêmes caractéristiques (y compris le micro auquel je suis très attaché)
Au final, 65g de gagnés (on aurait pu en gagner 30 de plus en changeant de frame), un flux FPV bien meilleur grâce à la cam et aux 2000µF de filtrage et un comportement en vol incomparable, pour 40€ de moins !
Là il y a un buzzer classique, mais y a masse de place pour y mettre un ViFly Beacon par exemple.
Le bilan, c'est que sans même avoir touché aux PIDs ni m'être pris la tête plus de 15 minutes sur le tuning (à part diminuer les filtres parce que justement le build est sain + qques réglages recommandés), il vole mieux que mon TBS Source One qui coûte le double !
Il reste un chouilla de propwash, mais avec une petite session réglages de PIDs il sera parfait. Et le retour vidéo est un bonheur 
Si j'ai dit des bêtises ou que vous avez d'autres conseils, n'hésitez pas !

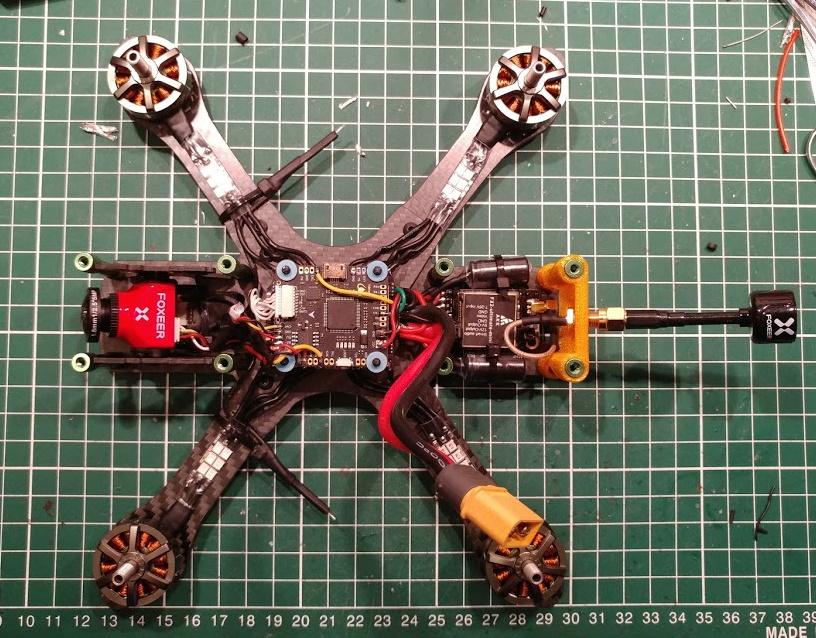



POIDS : 374 grammes
Liste des composants
Frame
Anniversary Special Edition Martian 215 16 € FC
MAMBA F405 MK2 F4 40A 3-6S DSHOT600 ESC 37 € ESCs
1 x 4-en-1 dans la stack cf. FC Moteurs
4 x Emax ECO Series 2306 4S 2400KV 36 € Jeu d'hélices
1 x AZURE POWER 4838 JOHNNY FREESTYLE 3 € Caméra FPV
Foxeer Falkor 2 Mini 36 € Émetteur vidéo
Eachine TX805 5.8G 40CH 25/200/600/800mW SMA, SA, Micro 10 € Antenne vTx
Foxeer 5.8G Lollipop 3 (vendues par 2) 6 € Récepteur radio
FrSky R-XSR 18 € LiPo
CNHL BLACK SERIES - 1500MAH 4S 100C Prix total : 162 €
-
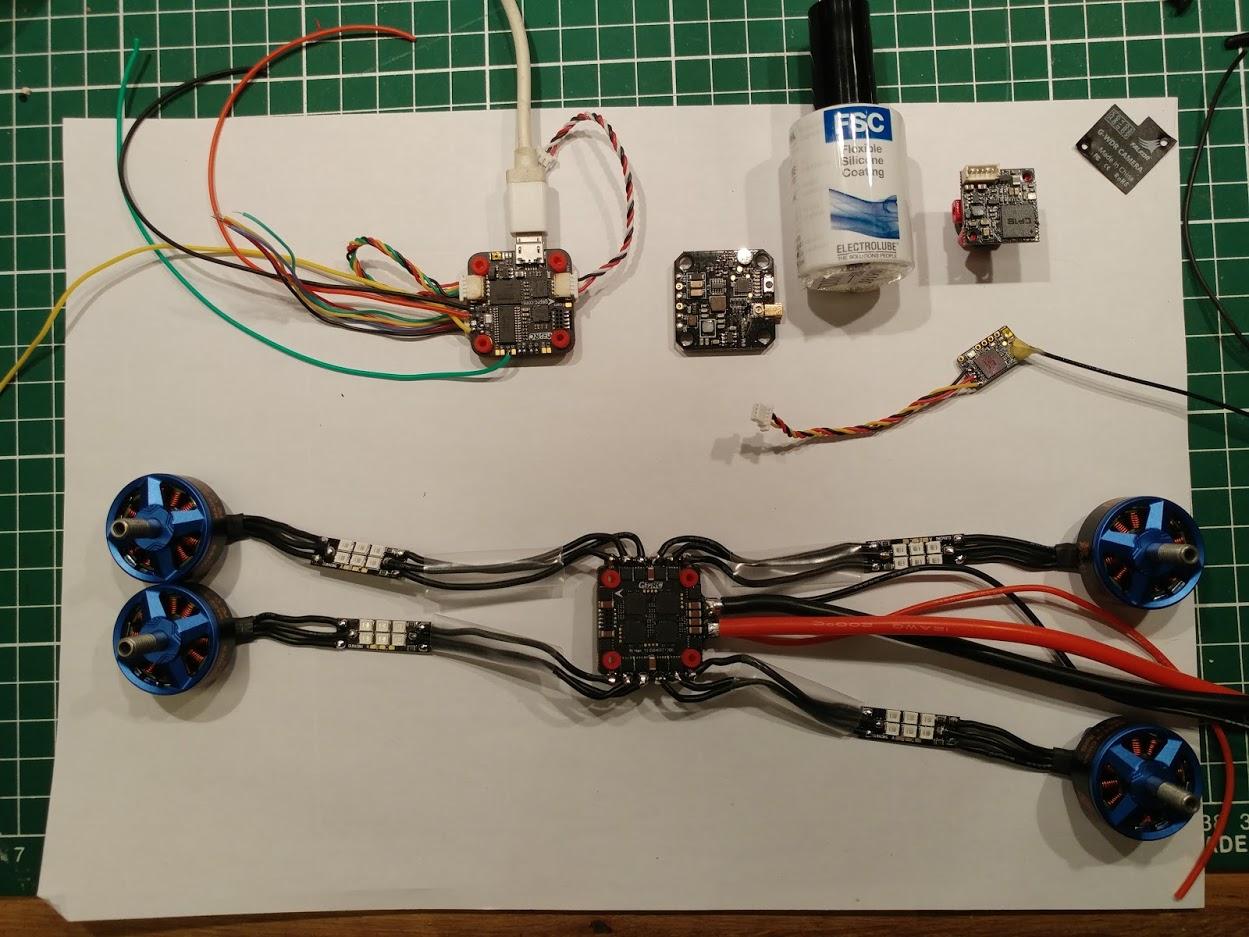
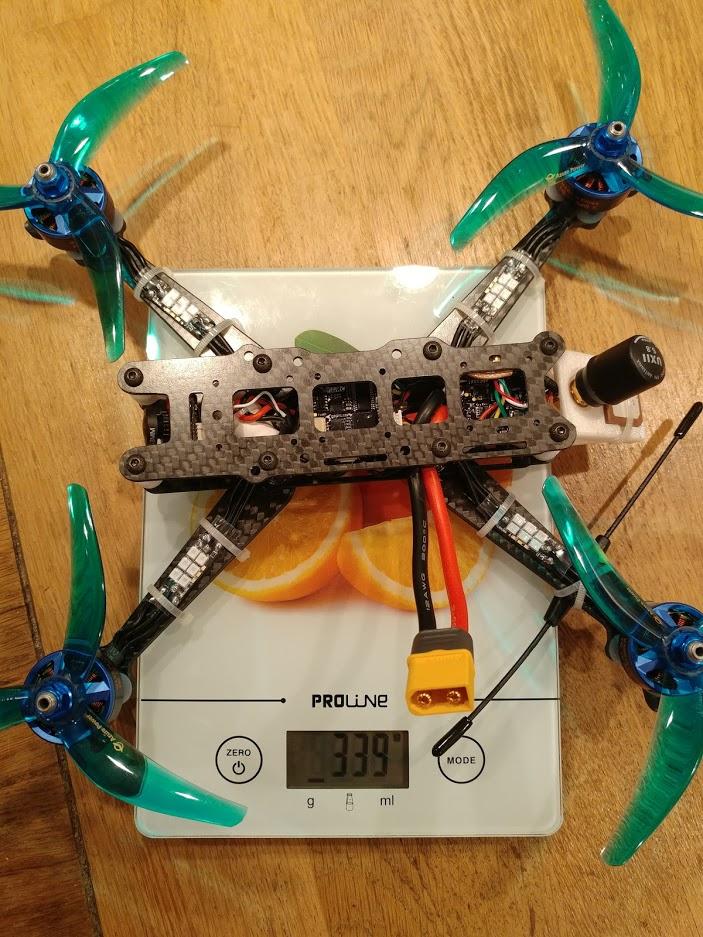
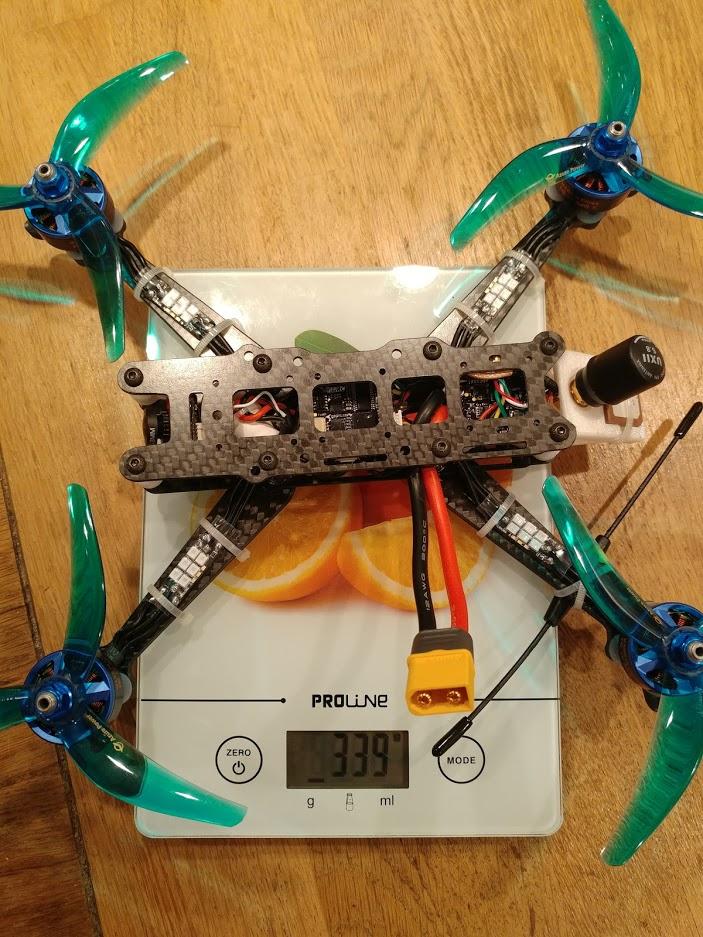
FlosStyle Aquatique ;)
FlosStyle Aquatique ;)Hello les pilotes,
Ce quad est maintenant en 6S, sous Emu 0.2.0 avec des moteurs Xing-E 2306 1700 Kv ==> post de mise à jour un peu plus bas avec une nouvelle vidéo des moteurs.
Voici un build assez low cost, qui m'a posé quelques soucis, mais qui m'a appris pas mal de trucs.
Il y a quelques temps, j'ai merdé, j'ai commandé une stack, plus ou moins par erreur. Plutôt que de la laisser moisir dans un tiroir (ce que j'aurais peut-être dû faire finalement
), je me suis dis que j'allais la mettre dans un nouveau build pour tester de nouvelles choses :
- étanchéité intégrale (un pote fait du kite, on aimerait faire quelques essais)
- le GPS, pour avoir plein de nouvelles infos
- mais surtout... le GPS rescue mode, en cas de failsafe au-dessus de l'eau
- Un build léger (mes autres 5" pouces sont des briques)
- Du plus haut KV, pour changer, en 2207
- Une configuration plus "stretched X" que "Wide X"
Avant de partager quelques retours voici un petit maiden. Il reste encore un peu de tuning à faire. Il y a une démo du GPS rescue à la fin :
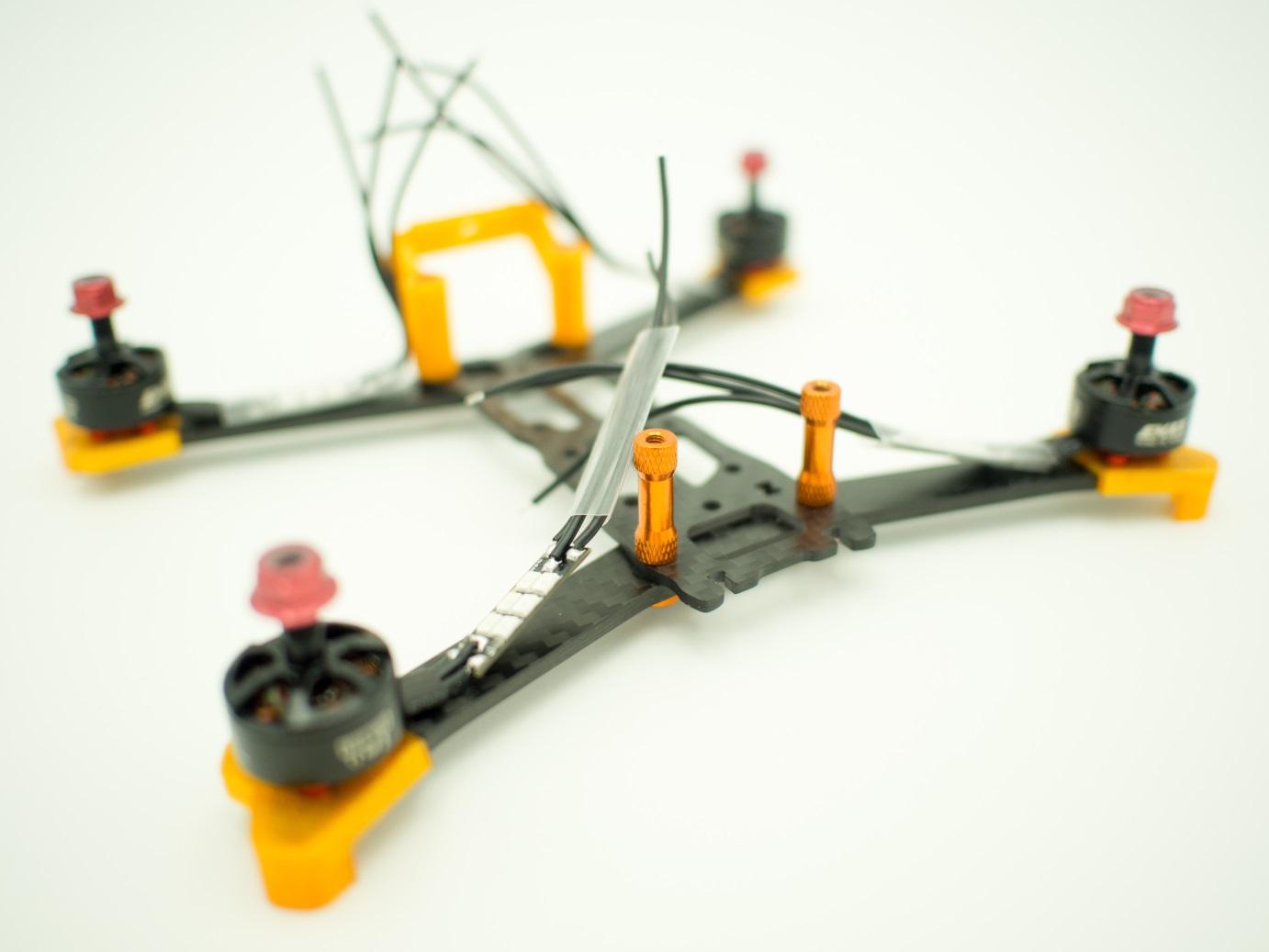
La frame : FlosStyle... ou plutôt SlosStyle

Là je me confesse, j'ai un peu honte, j'ai pris un clone... Si j'avais monté une config premium, j'aurais pris l'originale, là j'ai voulu faire du pas cher.
Néanmoins, cette frame de Kabab FPV est vraiment chouette, très bien pensée et donne dans la simplicité. Je pourrais en parler un moment, mais le concepteur le fait beaucoup mieux que moi et c'est très intéressant. Une review est aussi dispo sur WAF.
Au passage, c'est la version "HX" (haute) que j'avais commandé chez Banggood. Mais ils ont merdé et m'on envoyé des entretoises de n'importe quelle taille. Au final j'ai acheté en France les entretoises aux tailles originales, pour revenir à du "low profile". Le remplacement des entretoises m'a coûte 8.50€, ce que Banggood m'a remboursé (en euros, pas en points), ça mérite d'être précisé.
2 petits regrets, pas méchants : pour accéder aux vis de la stack 20x20, il faut retirer la sandwich-plate (et donc les entretoises centrales). Pour la stack 20x20 arrière, seules les 2 vis arrières sont utilisables.La stack : GEPRC Stable Pro F7
C'est plutôt de la merde, et je vous conseille d'en rester éloigné, pour plusieurs raisons :-
Ce double gyro (ICM20689) est un enfer ! Ultra sensible. Sur les premiers essais, il partait en "Yaw Spin To The Moon" au premier coup de throttle. J'ai dû appeler au secours sur FB. Pour régler ce problème, j'ai suivi 3 pistes :
- virer le RPM filter (qui ne fonctionne pas avec un double gyro, faut le savoir... par contre il est possible d'en désactiver un)
- desserrer les softmounts de la stack, que j'avais trop serrés et qui n'absorbaient plus assez bien les vibrations (finit les YSTTM, mais toujours des à-coups sur le Yaw)
- Sur les ESCs, passer le "PWM frequency" de 24 kHz à 48 kHz.
- Le connecteur avec soit disant l'UART1 de dispo ne fonctionnait simplement pas
- Dans la doc, ils montrent qu'on peut mettre un R9 MM sur le connecteur du récepteur radio en F.Port. Alors oui, ça marche... sauf que quand on zoom, on s'aperçoit que le pin est un RX et non un TX ! Donc on est en F.Port, mais sans la télémétrie ni le RSSI, c'est un peu débile.
- La connexion entre les différents étages de la stack se fait via des connecteurs et non des nappes : c'est fragile et peu pratique pour l'étanchéité.
- On peut changer le VTX, par contre, impossible de remplacer FC ou ESCs par un modèle différent.
Le GPS : BN-180
La belle découverte de ce build. Çà coûte 8€, c'est minuscule, c'est léger et ça permet plein de choses : rescue mode, vitesse, direction home, altitude, distances...
Pas de panique si au premier démarrage le GPS semble ne jamais se fixer, ça peut prendre jusqu'à 10 minutes. Ensuite ça ira beaucoup plus vite.
Depuis la v4 de Betaflight, pour autoriser l'armement sans fix GPS, il faut passer par la commande "set gps_rescue_allow_arming_without_fix = ON". Ce n'est plus comme sur la 3.*.Caméra FPV : Foxeer Falkor Micro
Dédicace à @Motard Geek, je teste enfin le CMOS J'avais profité des codes promo WAF il y a quelques semaines (merci les gars !). Au passage la FlosStyle ne prend que du format micro.
J'avais profité des codes promo WAF il y a quelques semaines (merci les gars !). Au passage la FlosStyle ne prend que du format micro.
Mes premières impressions sont plutôt bonnes. Même si le CCD me paraît plus doux et le CMOS plus "brut"/"pixelisé", c'est incomparable avec mes expériences mitigées de la Foxeer Mix et l'image est vraiment belle.
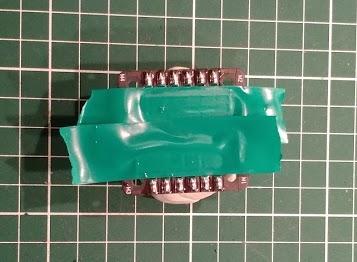
Au passage, cette Falkor Micro est parfaite pour l'étanchéification ! En général, je ne touche pas à la caméra, mais avec celle-ci, on peut intégralement l’étanchéifier, sachant qu'il y a un joint autour du capteur (cf. photos)Il reste encore un peu de tuning à faire. Il y a quelques petites vibrations et un peu de propwash, mais je pense pouvoir m'en débarrasser (pour l'instant j'ai désactivé tous les filtres, sauf les 2 dynamiques et j'avais baissé les D, je dois pouvoir les remonter un peu). Je retenterai peut-être aussi le RPM filter en désactivant l'un des 2 gyros. Mais après avoir bien galéré, là j'avais juste envie de le faire voler
J'ai pratiquement gagné 100g par rapport à mon build principal, la différence se ressent tout de suite en vol, c'est top ! Après les moteurs sont pas ouf, mais pour le prix, ça vole plutôt pas mal, sachant qu'il finira ptetre perdu en mer
Au passage, est-ce que vous avez des conseils/astuces pour fixer des flotteurs à nos quads, sans trop pourrir leurs caractéristiques de vol ? (l'idée étant juste de l’empêcher de couler).











POIDS : 339 grammes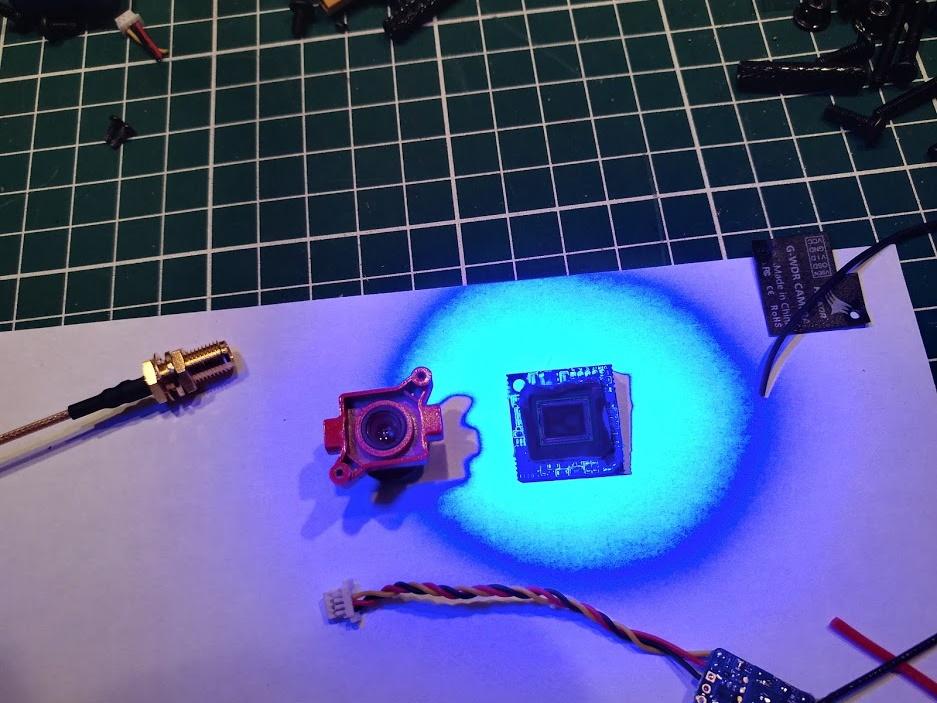
Liste des composants
Frame
Slosstyle HX (moddée en low profile) 22 € FC
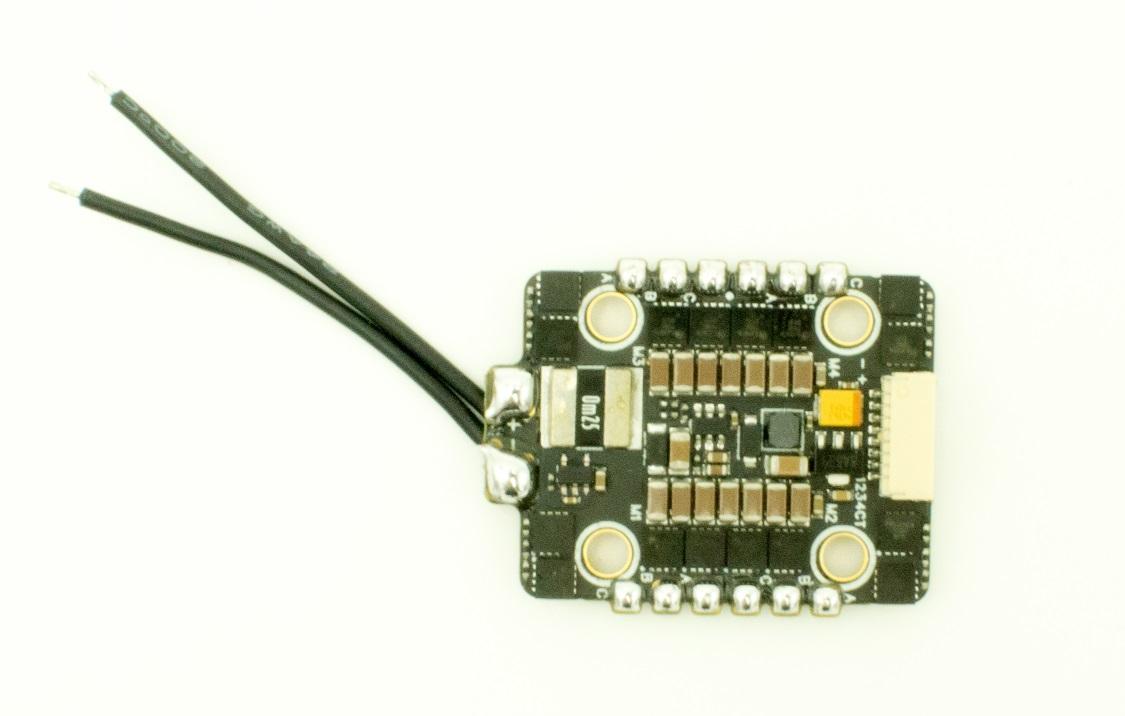
GEPRC Stable F7 Stack (avec VTX) 80 € ESCs
1 x 4-en-1 dans la stack cf. FC Moteurs
4 x DYS Samguk Series Wei 2207 2600KV 32 € Jeu d'hélices
1 x HqProp Ethix S4 3 € Caméra FPV
Foxeer Micro Falkor 28 € Émetteur vidéo
AKK Ultimate FX3 (à la place de celui de la stack pr le micro) Antenne vTx
Realacc RHCP Super mini UXII Stubby 6 € Récepteur radio
R9 MM 25 € LiPo
INFINITY 1500MAH 14.8V 110C 4S RACE SPEC Prix total : 196 €
-
Emax TinyHawk Freestyle Unchained !
Emax TinyHawk Freestyle Unchained !Salut tout le monde,
C'est pas vraiment un build, mais il y a quand même pas mal de build dans l'histoire, donc je me permets de le poster dans le Dronebuilds, n'hésitez pas à le déplacer si nécessaire
Un grand merci à @Motard Geek qui m'a engrainé dans l'aventure de ce TinyHawk Freestyle, c'est une pure petite bombe, je le surkife !
 Comme je connaissais ses défauts, dès réception, avant même son premier vol, il est passé direct à l'atelier, et je suis hyper content du résultat, donc je partage tout ça, si ça peut tenter d'autres personnes !
Comme je connaissais ses défauts, dès réception, avant même son premier vol, il est passé direct à l'atelier, et je suis hyper content du résultat, donc je partage tout ça, si ça peut tenter d'autres personnes !
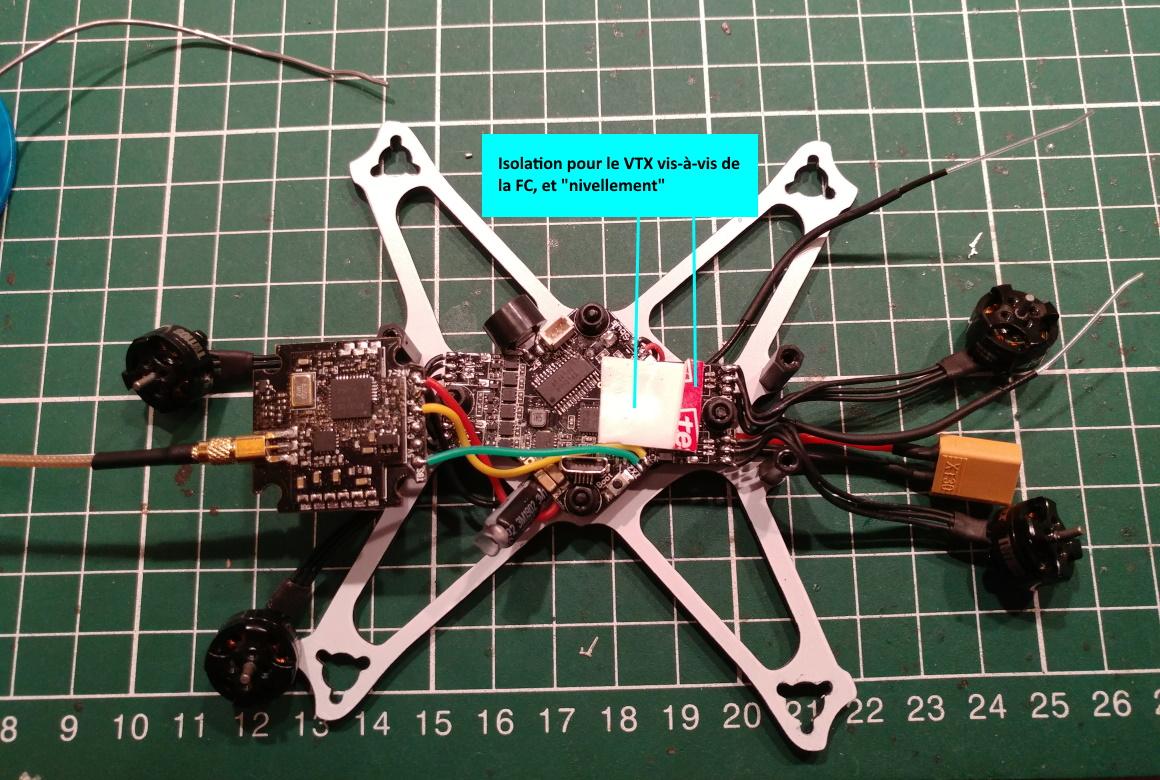
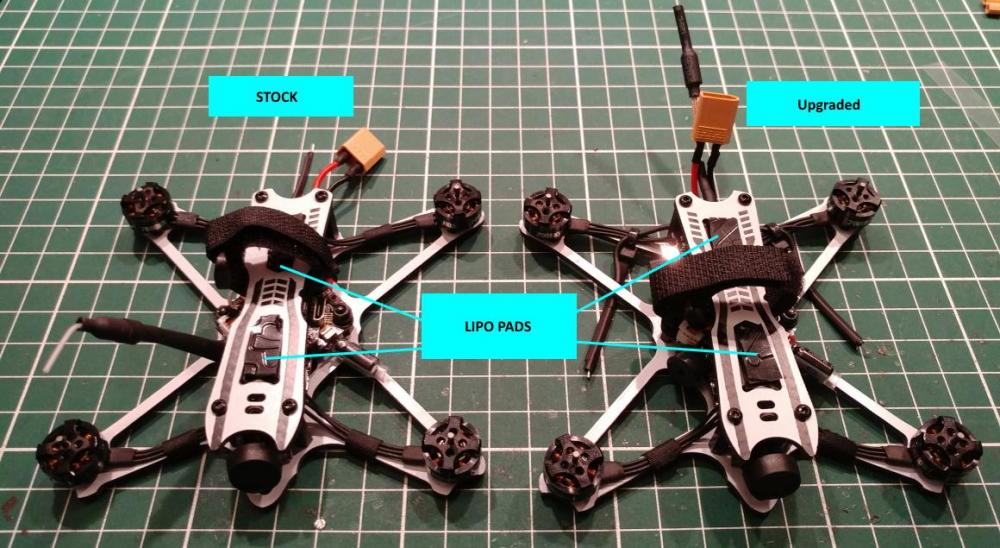
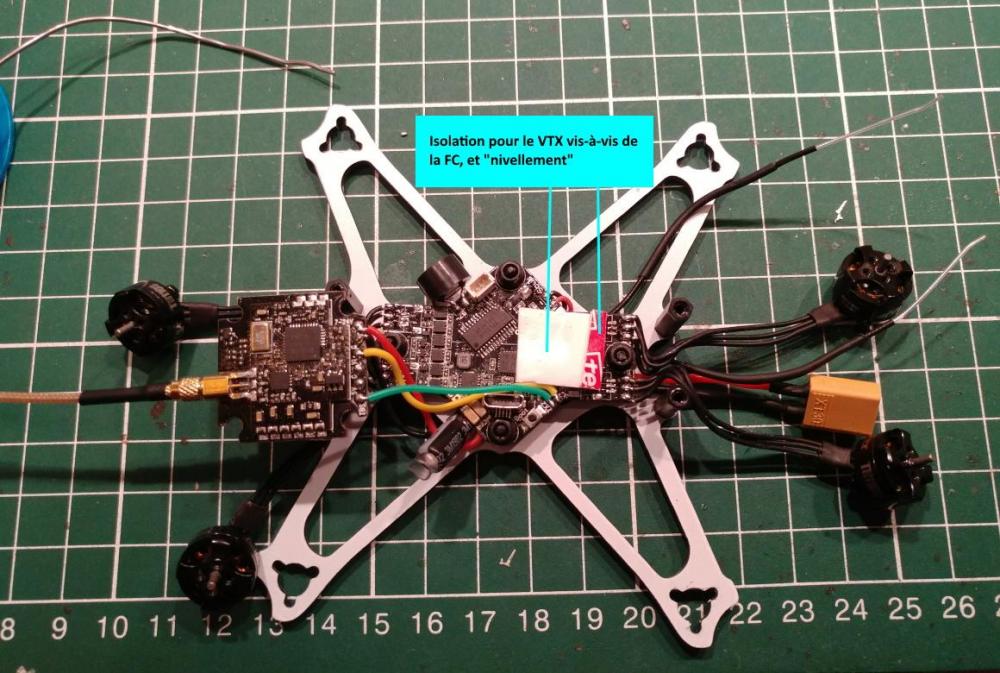
L'idée était de le "libérer de ses chaînes" (RX et VTX intégrés) pour lui donner les caractéristiques d'un quad freestyle classique (portée, télémétrie, buzzer). Le tout dans un budget raisonnable, mais surtout sans trop impacter le poids.
Au menu des upgrades :
- VTX 600mW avec Microphone et Smart Audio (AKK FX3 Ultimate)
- R-XSR en F.Port, 1 fil : signal, télémétrie, RSSI
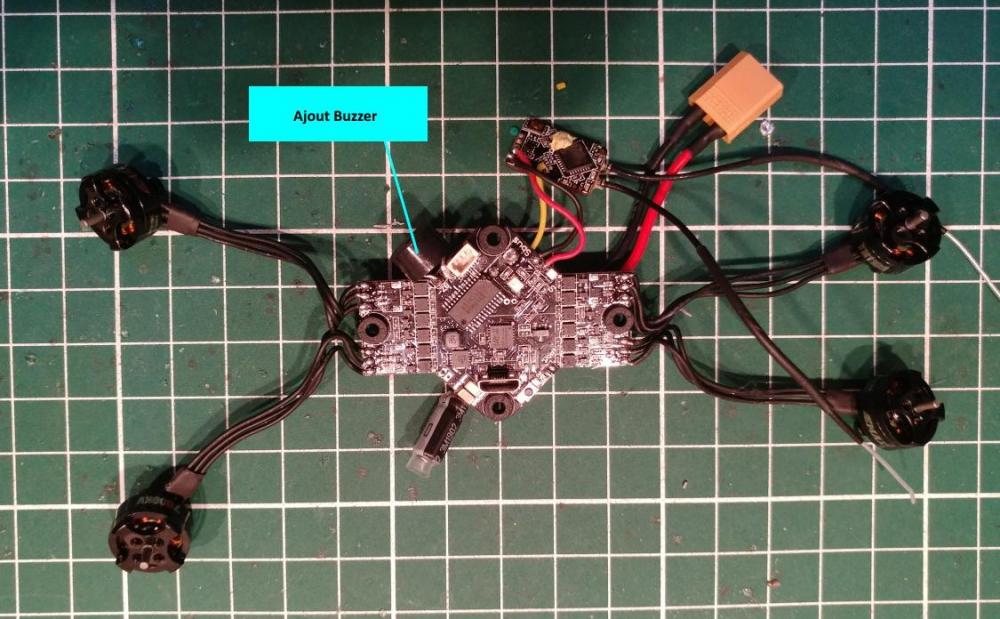
- Buzzer
- Lipo pad
- XT30
Le coût de tout ca ? 35€ environ (mais j'avais déjà tout sous la main).
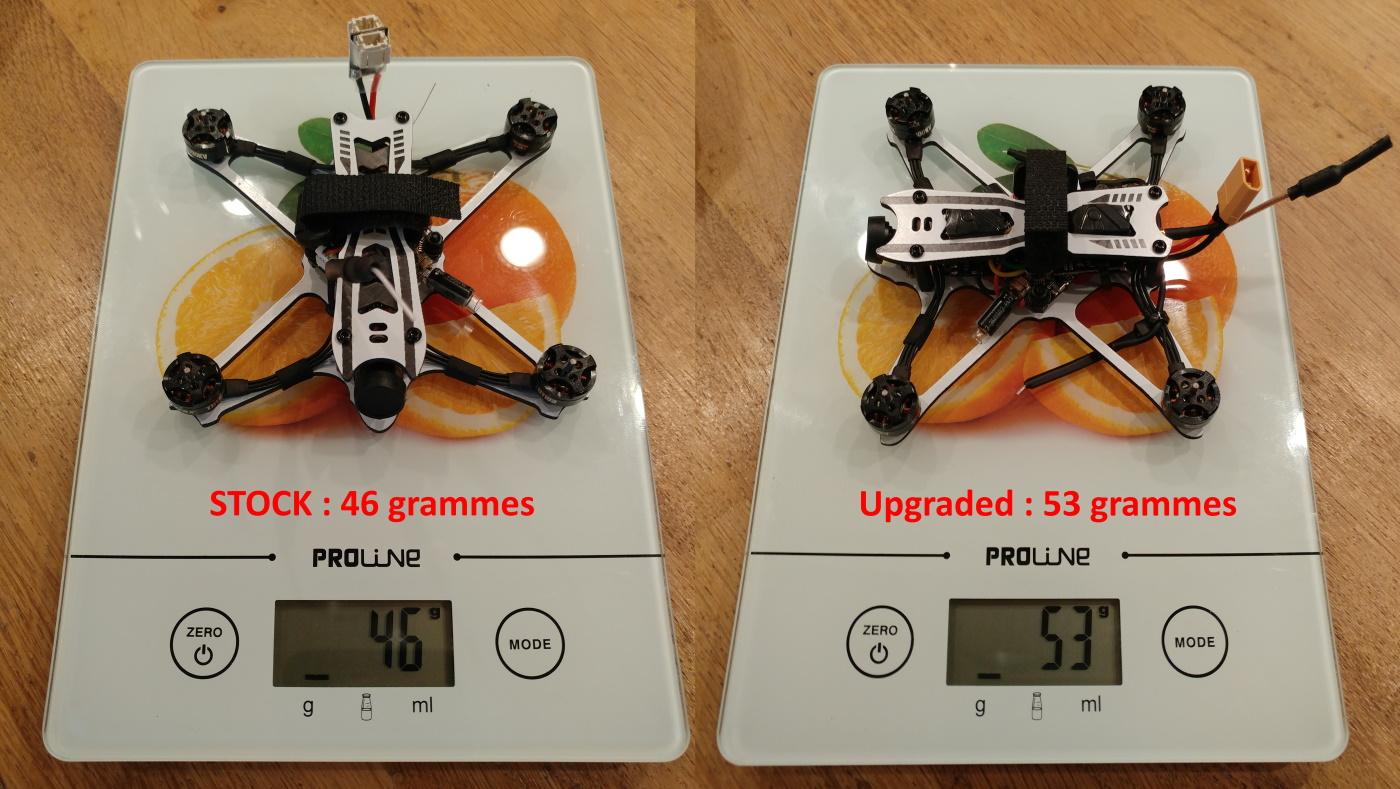
Le poids ? 7 grammes de plus.Il a fallu un peu ruser, mais avant de rentrer dans les détails, une petite vidéo de la bête (le VTX était à 200mW "seulement" car je ne volais pas seul) :
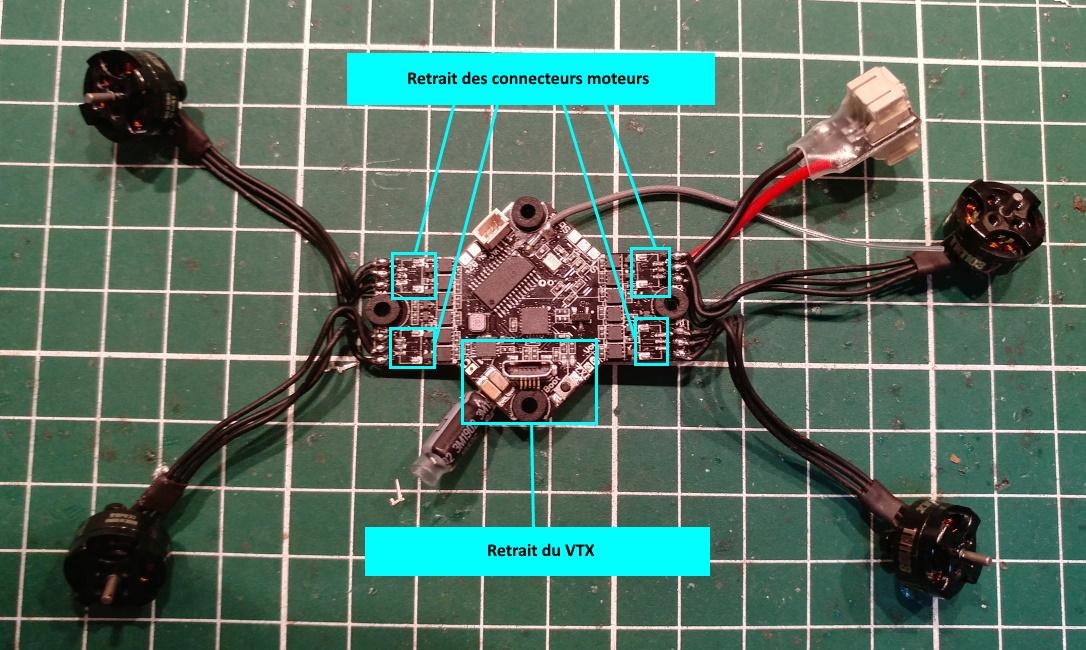
Toutes les photos qui accompagnent le build sont annotées pour expliquer chaque étape des modifications.
J'ai décidé de ne pas changer la caméra pour des raisons de coût et de poids (c'est pas du standard, il faut donc imprimer un support TPU).
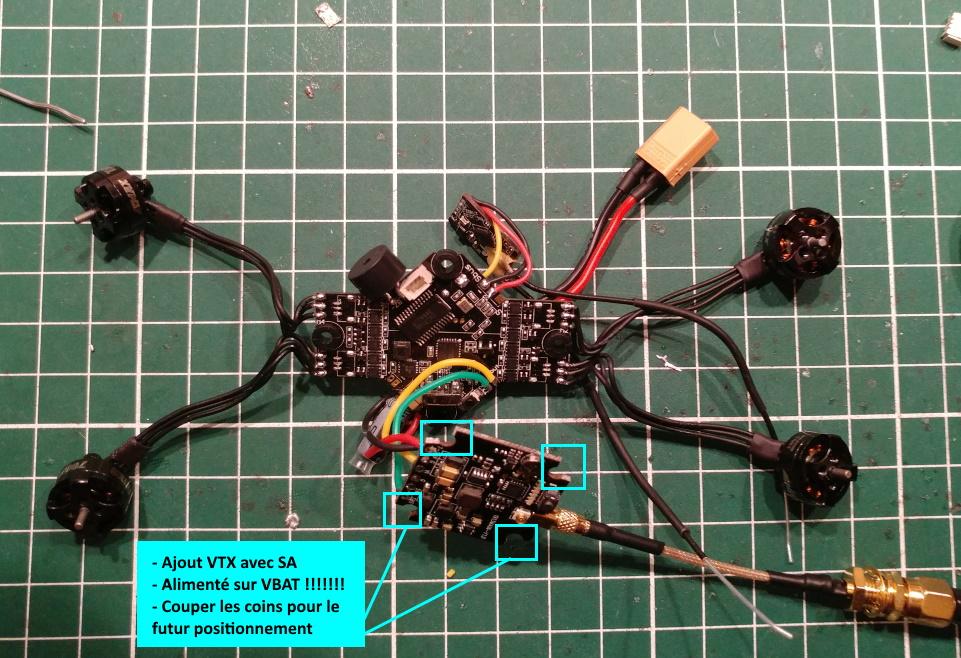
VTX : AKK FX3 Ultimate
On ne peut pas alimenter le VTX depuis le régulateur de la FC, il ne tiendra pas la charge. Les VTX compacts sont en 5V, ce qui oblige à ajouter un régulateur voire un filtre LC, donc on n'est plus si gagnant, et j'ai finalement opté pour mon VTX fétiche en 20x20 : pas cher, microphone, Smart Audio, 600mW, plutôt fin. Et j'en avais un en spare.
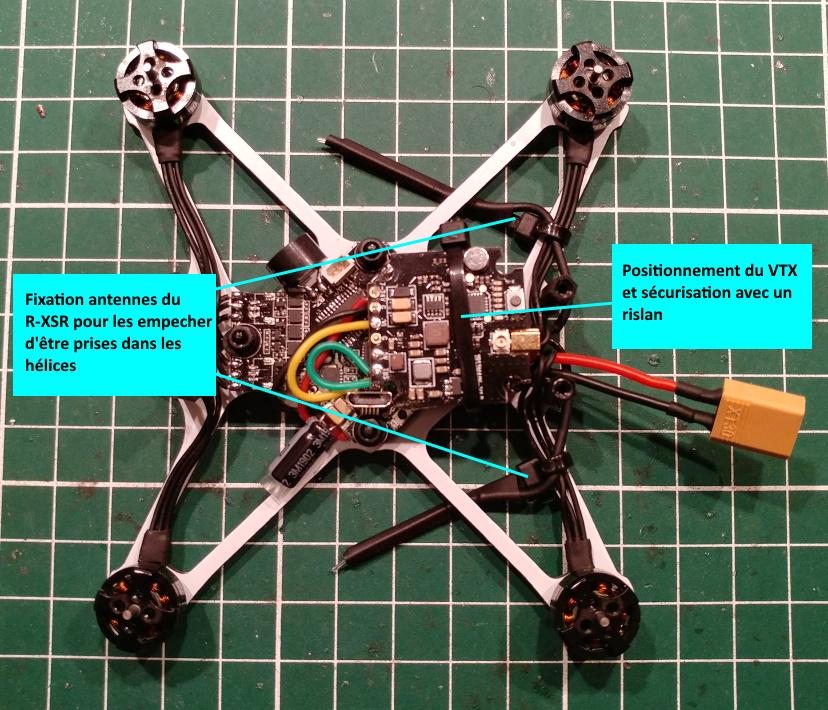
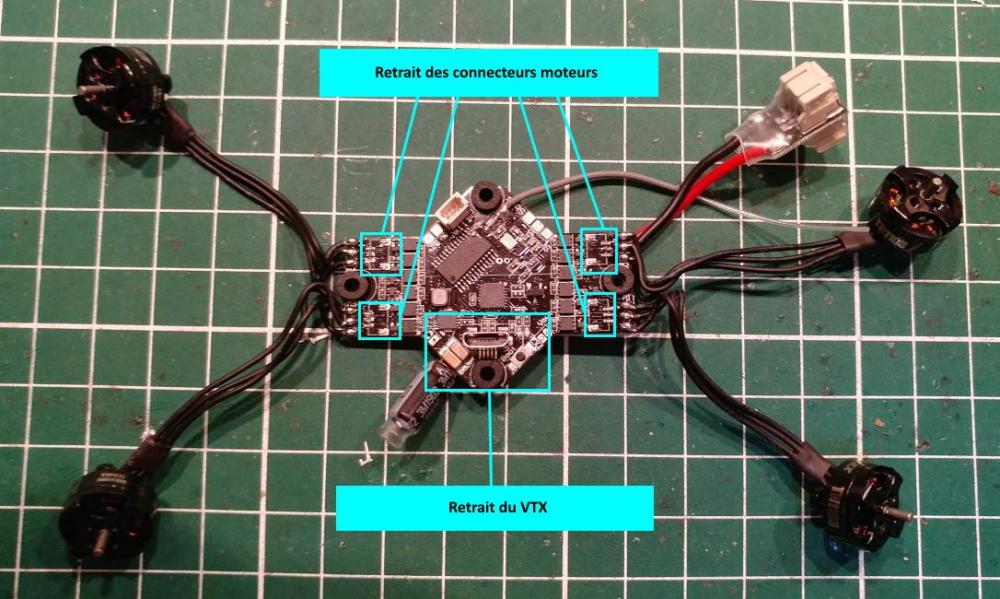
Pour avoir de la place, j'ai viré les prises moteurs (qui ne servent à rien) et coupé les coins du VTX : il s'intègre parfaitement !
Le remplacement du VTX permet aussi de se débarrasser de la grosse antenne pas super bien placée (à dessouder).
Il y avait une autre option : le TBS Unify Pro32 Nano 5G8, contrairement à ce qu'indiquait la première version de la doc, il peut être alimenté en 5 à 13V. Il est compact, mais cher, sans micro et en SA 2.1.
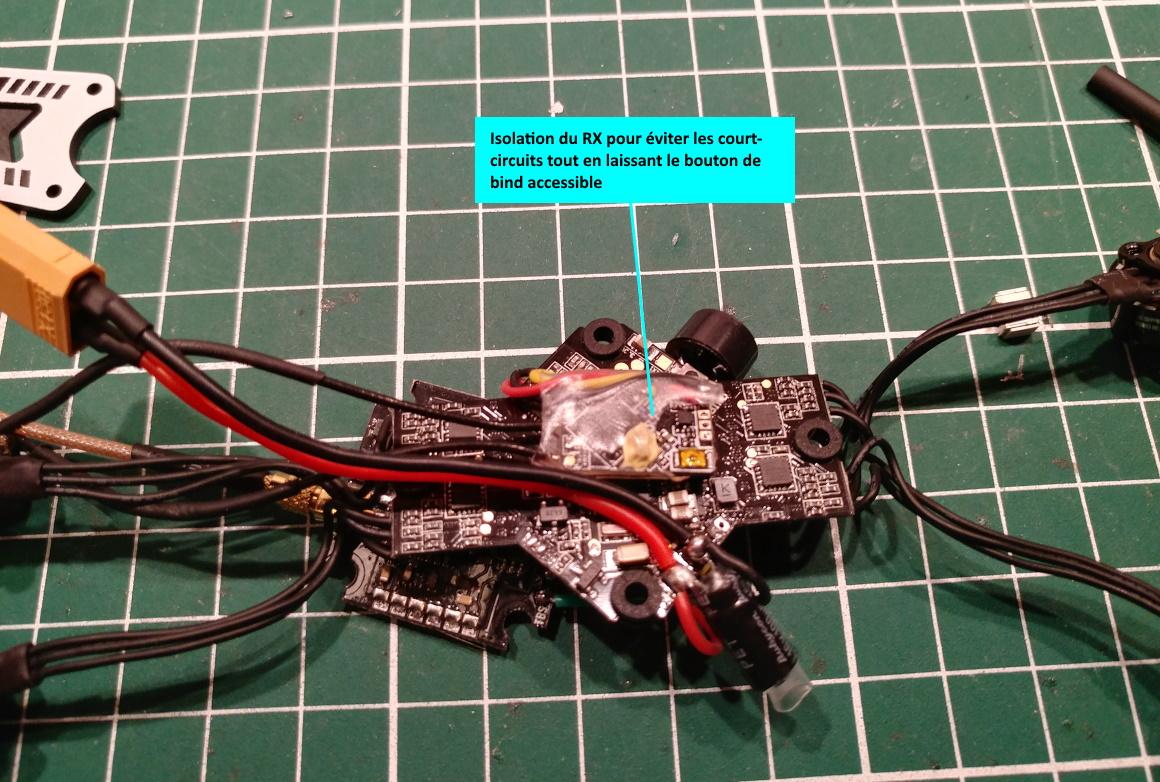
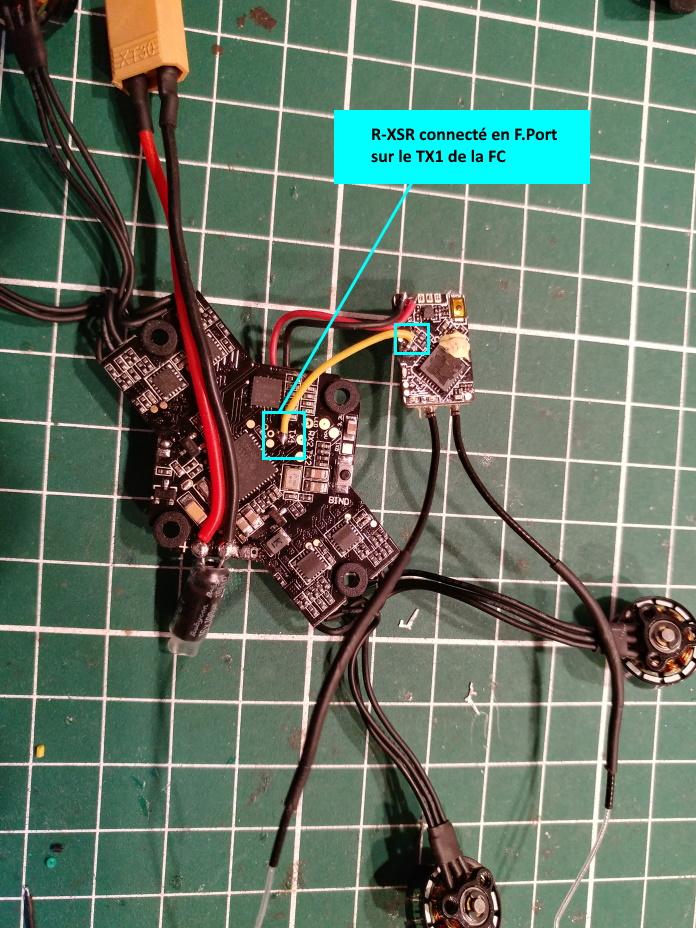
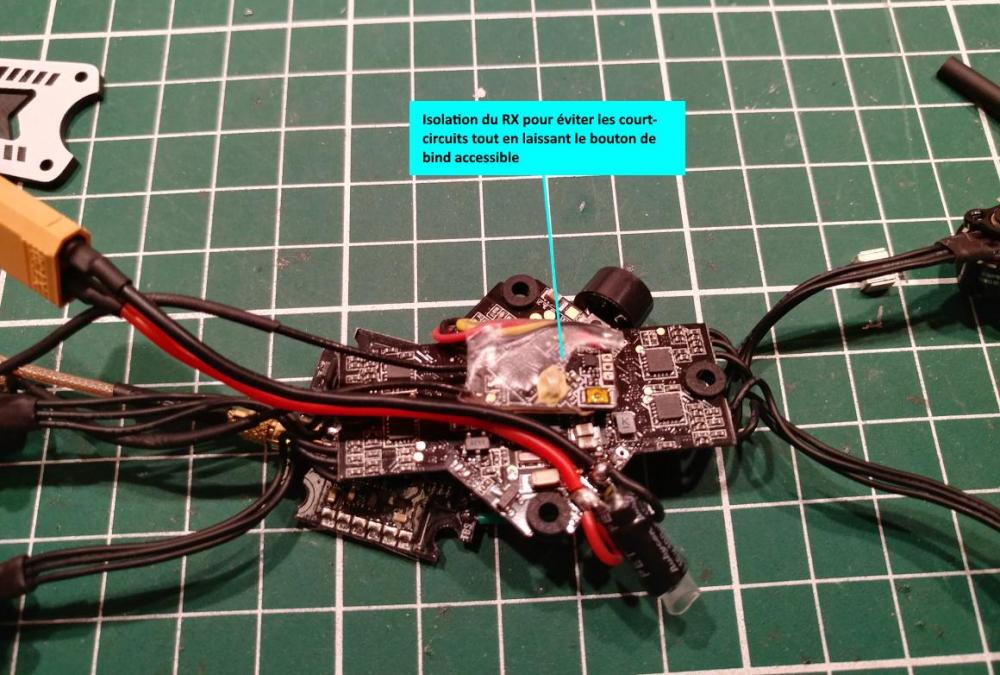
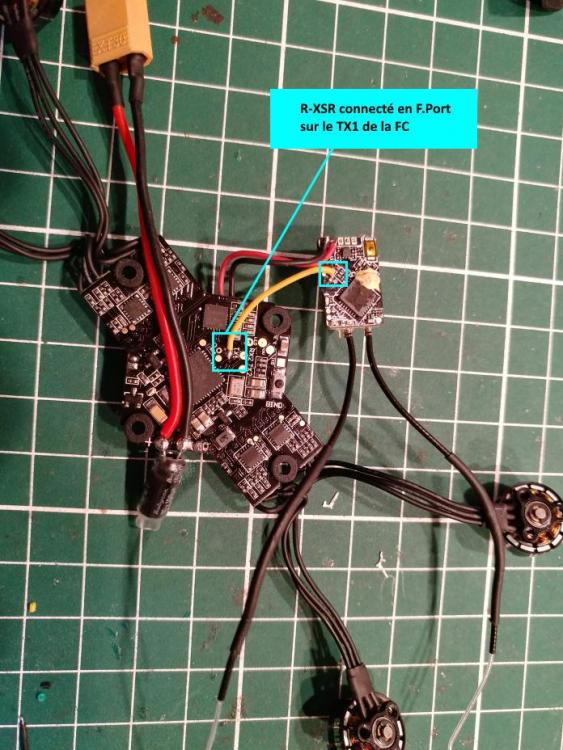
RX : FrSky R-XSR
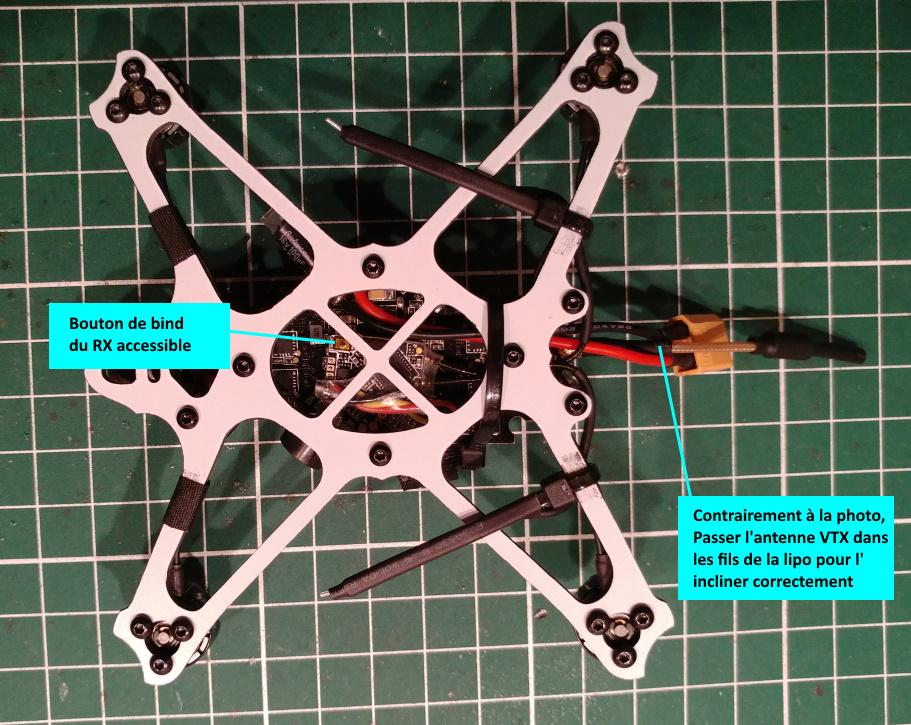
Côté RX, suite à ma migration en R9, j'avais qques R-XSR en spare. Ca tombe bien, une fois le connecteur enlevé il est super compact ! Sous la FC il y a un pad TX1 de dispo : de quoi connecter le R-XSR en F.Port et bénéficier du signal, de la télémétrie et du RSSI sur un seul fil, tout ce qui permet de limiter la prise de poids est bon à prendre
J'ai fixé les antennes sur la frame (cf. photos), elles ne prennent pas de place, sont éloignées de l'antenne VTX et ne risquent pas de se prendre dans les hélices
Comme pour l'antenne VTX, ne pas oublier de dessouder l'antenne stock de la FC.
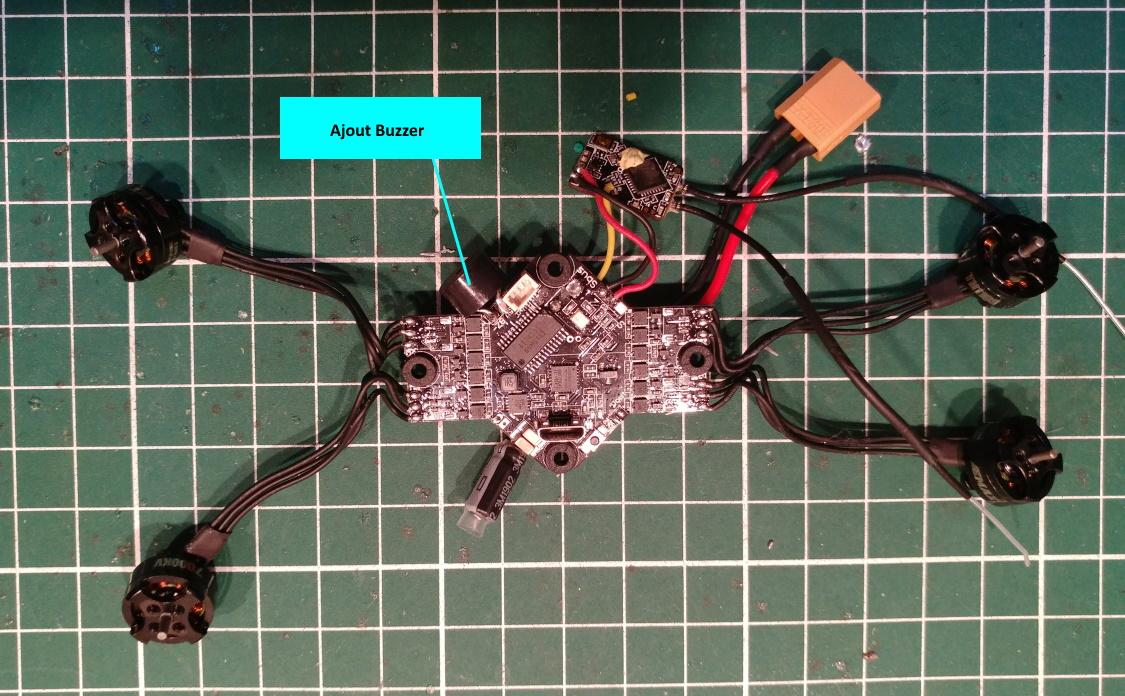
Les bonus
-
Comme tout tiny, on ne peut pas compter sur le mode beacon des ESCs, on n'entendra rien, j'ai donc ajouté un petit buzzer qui m'a déjà été bien utile
-
Pour bien bloquer la lipo, j'ai également découpé des petits morceaux de Ummagrip que j'ai intégrés dans les renfoncements de la top plate, elle ne bouge plus !
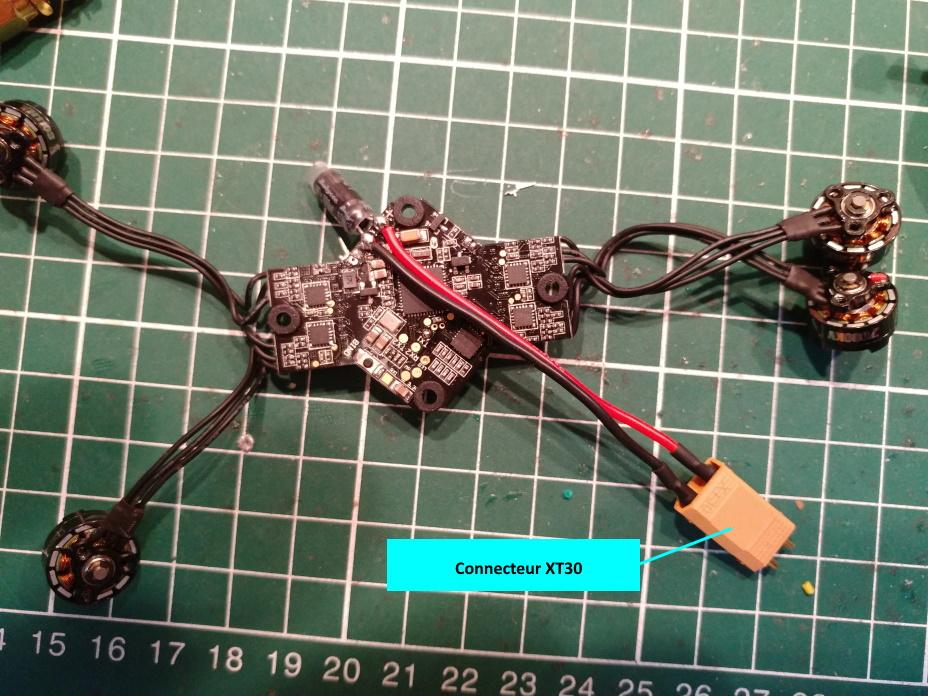
- Evidemment, je suis passé en XT-30
Bilan
Bah c'est une tuerie
 Pratiquement aucun glitch, une excellente portée, ça vole super bien, ce châssis est hyper robuste (une des raisons qui m'a fait choisir ce toothpick en particulier), l'autonomie est folle. Quand je vois la différence entre mon ancien Beta75X et celui-ci, alimenté par les même lipos, j'ai presque l'impression qu'il y a de la magie L'ajout des 7g pour les upgrades n'est pas un problème, et j'irais même encore plus loin : c'est mieux ! Je trouve le quad un peu plus stable sans perte notable de punch. En fait j'en ai acheté 2 (pour moi et pour le frangin), donc j'ai, pu comparer le mien modifié avec celui de mon frère non modifié pour le moment (à part le XT30).
Pratiquement aucun glitch, une excellente portée, ça vole super bien, ce châssis est hyper robuste (une des raisons qui m'a fait choisir ce toothpick en particulier), l'autonomie est folle. Quand je vois la différence entre mon ancien Beta75X et celui-ci, alimenté par les même lipos, j'ai presque l'impression qu'il y a de la magie L'ajout des 7g pour les upgrades n'est pas un problème, et j'irais même encore plus loin : c'est mieux ! Je trouve le quad un peu plus stable sans perte notable de punch. En fait j'en ai acheté 2 (pour moi et pour le frangin), donc j'ai, pu comparer le mien modifié avec celui de mon frère non modifié pour le moment (à part le XT30).
J'oubliais, un petit point un peu perturbant au début : la lentille de la caméra déforme beaucoup les bords. Cette distorsion surprend lors des premiers dives, mais on s'habitue vite.
J'ai profité d'une promo chez StudioSport, il est en ce moment à 94€ (il en reste 2 au moment où j'écris), soit le même prix que chez Banggood.


POIDS : 53 grammes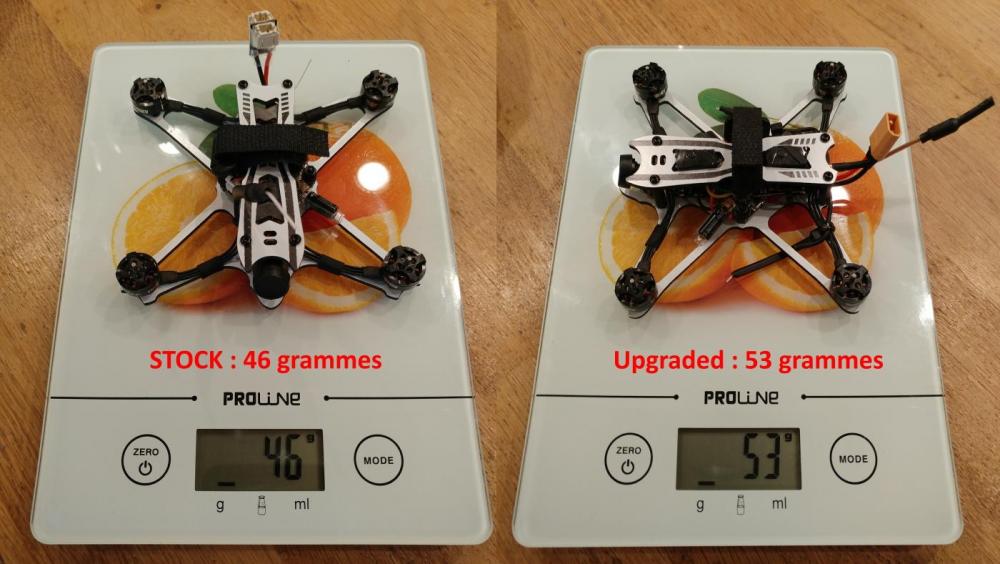
Liste des composants
Frame
Emax TinyHawk Freestyle 94 € FC
Emax TinyHawk Freestyle ESCs
4 x Emax TinyHawk Freestyle Moteurs
4 x Emax TinyHawk Freestyle Jeu d'hélices
2 x Emax Avan Rush 2.5 Caméra FPV
Emax TinyHawk Freestyle Émetteur vidéo
AKK FX3 Ultimate 18 € Récepteur radio
FrSky R-XSR 20 € LiPo
GNB 450mAh 2S HV Prix total : 132 €
-
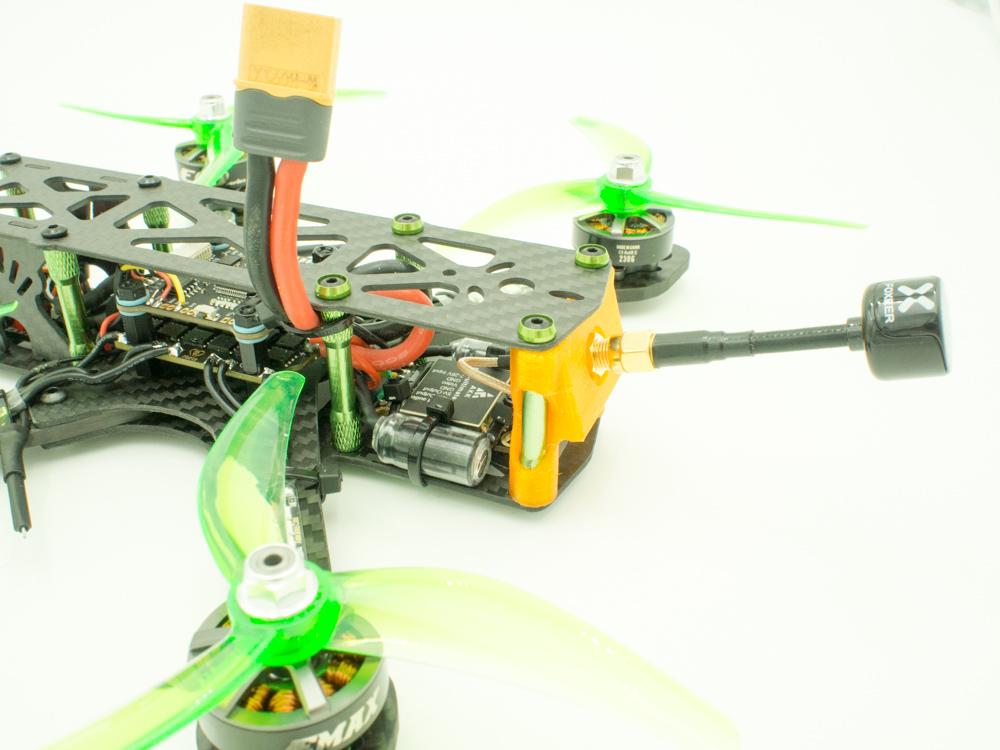
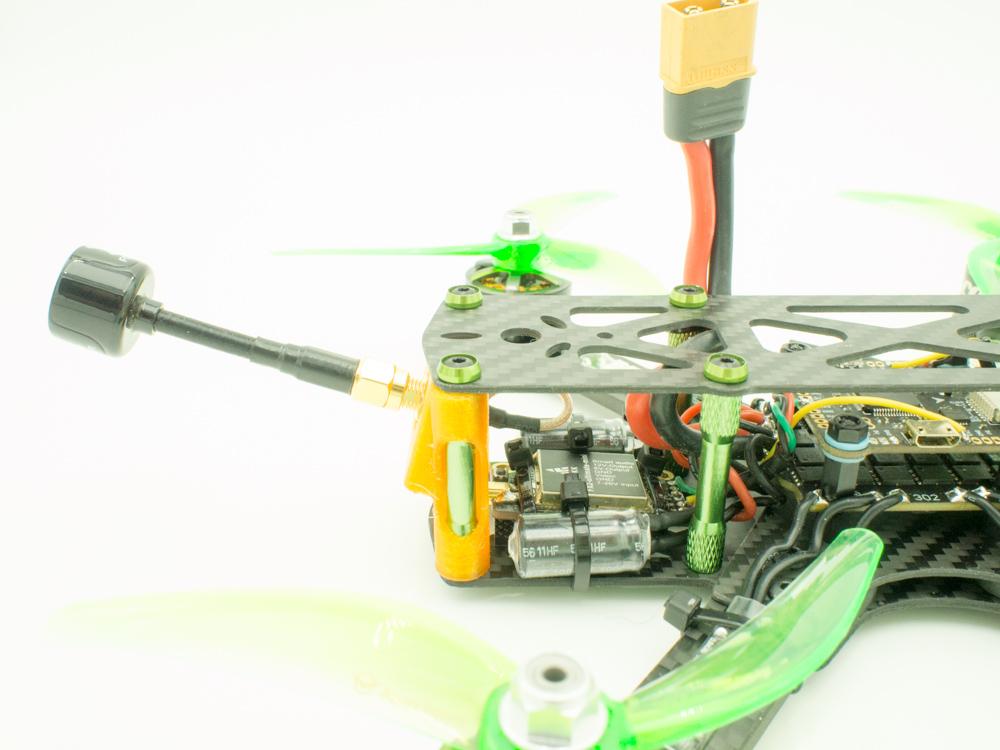
Intrepid v2 4" - 4K (Tarsier)
Intrepid v2 4" - 4K (Tarsier)Hello,
Après mon petit Micro Alien HD, je continue ma quête d'une machine polyvalente, compacte, légère, avec des sensations aussi proches que possible de celles d'un 5", mais autonome en terme de vidéo HD (même s'il est parfaitement capable d'embarquer une GoPro). Cette fois-ci, le choix s'est porté sur une configuration un peu tombée dans l'oubli : le 4" ! Le but était de rester sur une alimentation type 3" (XT-30/850 mAh) mais d'avoir plus de patate, de stabilité et d'inertie qu'un 3". Ce build s'appuie sur des moteurs 1606, avec des hélices 4", le résultat est impressionnant. Même en ajoutant une Session5 sur le bestiau, le Freestyle passe tranquille !
Pour changer : une petite présentation de ce build en vidéo ! La 2ème partie propose des images en vol de la Tarsier, de la Session5 et de la GoPro 7 Black. Pour les plus curieux, la vidéo est suivie d'un peu de lecture avec pas mal de précisions, des retours sur les différents composants et les difficultés rencontrées.
Comme pour le Micro Alien HD, ce build a été assez délicat, la Tarsier prend beaucoup de place et quand on veut placer un ViFly et un condensateur dans le bus, ça devient vite complexe. Bien que j'ai opté pour une frame avec 2 stacks en 20x20, la seule solution pour tout rentrer a été de tourner les ESCs 4en1 de 90° et remapper les moteurs dans BF.
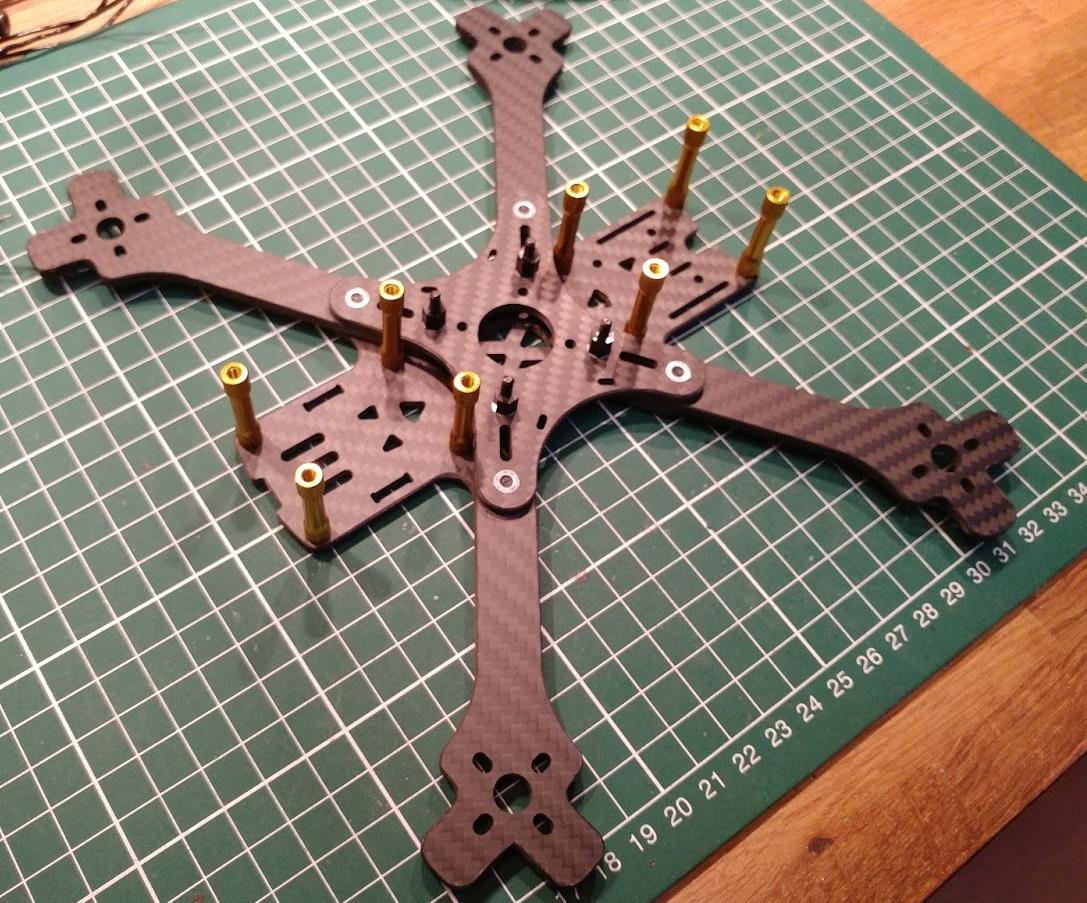
La frame : AirBlade Intrepid v2 4"
Le choix des frames 4" est assez restreint. Si on ajoute quelques critères indispensables à mes yeux...
- bras séparés de la bottom plate pour limiter la résonance de la frame
- 2 stacks de 20x20mm, parce qu'il y a un paquet de trucs à faire rentrer
- la batterie au dessus
- pas d'hélices visibles dans les caméras HD/FPV
... il ne reste plus beaucoup d'options, et j'ai trouvé cet Intrepid v2 qui cochait toutes les cases en s'offrant le luxe de proposer un support de GoPro intégré ! Introuvable en France, je l'ai commandé sur le site officiel, je l'ai reçu en moins de 10 jours, le prix, même avec les frais de port reste correct. A noter, pour ceux qui n'ont pas besoin d'embarquer une caméra hybride, la top plate peut être ajustée à 3 hauteurs différentes pour avoir une frame "low profile". Avec la Tarsier et son double objectif, les entretoises limitent l'ajustement de la caméra, mais ça fait le job.
Betaflight et RPM filter
Le choix de la FC et des ESCs n'a pas été fait au hasard, je voulais une configuration réputée compatible avec le RPM Filter. Il a été facile à mettre en place, sauf que je n'ai pas constaté l'effet "magique" tant attendu : par défaut, le RPM filter est configuré pour un build classique en 5". La fréquence de résonance d'une frame 4" n'est pas la même et mes compétences en filtrage étant encore très limitées, j'ai lâché l'affaire. D'autant qu'avec Betaflight 4.0.3, mes moteurs chauffaient très fort et le comportement en vol n'était pas top. J'ai fini par repasser sous Betaflight 3.5.7 (comme mes autres 3"), et j'ai aussitôt retrouvé un quad au comportement sain. Je reviendrai peut-être aux réglages du RPM filter et à BF4 plus tard.
La partie alimentation
C'était l'une de mes inquiétudes avant de démarrer ce build :
Je voulais rester sur les lipos classiques que j'utilise sur mes 3" (des 850 mAh en XT-30). Je voulais aussi des moteurs bien balaises. Et les specs fournies avec les moteurs indiquaient des courants énormes pour des hélices 4", bien au delà ce de que peut supporter un connecteur XT-30 et du fil 16/18 AWG. J'ai utilisé du fil 14 AWG, et finalement, aucun problème. Au début j'avais limité le throttle à 90% pour ne pas prendre de risque, finalement j'ai vite fait sauter ce bridage, le connecteur n'est même pas tiède en fin de session. Mais je ne fais pas de race, je ne suis pas full throttle tout le temps

Caméra : Caddx Tarsier
Vous aurez peut-être suivi le topic dédié sur le forum, mais je vais résumer mon avis sur cette caméra. Le flux FPV est top, elle n'a pas à rougir face à des caméras dédiées FPV (comme c'était le cas pour les générations précédentes). Ergonomiquement, c'est un peu galère : vis trop courtes, stack très haute (2 cartes + une plaque de refroidissement), appli pas évidente à trouver sur le Store, carte SD à formater via l'appli, mais chaque problème a sa solution et ces petites galères s'oublient vite. Pour en venir à la partie qui intéresse le plus grand nombre : la HD. Ici encore, c'est nettement mieux que les générations précédentes, terminé les artefacts de compression, c'est propre ! Elle propose de la 4K... que je n'ai pas testée. Parlons de ce qui fâche : le FOV en HD. Si le FOV avait été plus large, cette caméra aurait été presque un sans faute. Là malheureusement, ça gâche un peu le plaisir et elle ne peut pas prétendre à remplacer une GoPro
 Enfin, il faut savoir que la 4K n'utilise pas tout le capteur, l'image est cropée pour obtenir du 16/9. Pour tirer le meilleur parti de cette caméra et utiliser l'intégralité du capteur, une seule recommandation : filmer en 1440p 4/3 et ajouter l'effet SuperView en post-prod. Ça tombe bien, un petit outil vient d'arriver et facilite grandement l'opération !
Enfin, il faut savoir que la 4K n'utilise pas tout le capteur, l'image est cropée pour obtenir du 16/9. Pour tirer le meilleur parti de cette caméra et utiliser l'intégralité du capteur, une seule recommandation : filmer en 1440p 4/3 et ajouter l'effet SuperView en post-prod. Ça tombe bien, un petit outil vient d'arriver et facilite grandement l'opération !
RX : R9 MM
Ici, je reste sur ce qui fonctionne bien et me suffit plus que largement, le R9 de FrSky en firmware Flex (868 Mhz), protocole F.Port, simple et efficace.
VTX : AKK FX3 Ultimate
2ème build où j'utilise ce AKK FX3 Ultimate et j'en suis super content : format 20x20, Smart Audio, connecteur MMCX, jusqu'à 600 mW et mon bonus préféré : le microphone, pour 17€, que demande le peuple ?
Problèmes rencontrés
J'ai eu 2 soucis lors des premiers vols, ça en aidera peut-être d'autres :
- Perte aléatoire du retour vidéo : l'espace pour le build étant très limité, mon VTX était stacké au dessus de la Tarsier avec un minimum d'écart. Il arrivait parfois que la prise de l'antenne wifi de la Tarsier entre en contact avec le VTX au niveau d'un petit condo, et le VTX se coupait. J'ai simplement imprimé une petite plaque de 0.5mm en TPU pour éviter tout contact entre les 2 cartes.
- Perte aléatoire du signal radio : sans aller jusqu'au failsafe, j'avais quelques "RXLOSS" très brefs. Dans un premier temps, j'ai boosté la puissance de mon TX à 100mW, ce qui a fortement amélioré les choses. L'antenne de mon RX passe sous les ESCs. Avec la rotation à 90° des ESCs, elle est pratiquement en contact avec les pads moteurs. Les gros courants qui passent si près perturbent le signal radio. Je vais rerouter le chemin de l'antenne, et au pire, je la déplacerai sur un bras.
Le mot de la fin
Pas mal de galères et de difficultés pour builder tout ça proprement, mais au final, c'est une petite machine capable de faire beaucoup de choses et avec une énorme réserve de puissance. Le 4" étant un peu passé de mode, on trouve peu d'infos, peu de presets pour BF etc. Mais je pense que ce type de setup avec une caméra hybride peut avoir de l'avenir... Si la Tarsier apporte son lot d'améliorations, ce n'est pas encore elle qui nous dispensera de trimbaler une GoPro qui coûte le prix d'un quad
 Mais vu les progrès entre chaque génération, j'ai bon espoir que d'ici un an, ces caméras deviennent une alternative crédible
Mais vu les progrès entre chaque génération, j'ai bon espoir que d'ici un an, ces caméras deviennent une alternative crédible 












POIDS : 228 grammes
Liste des composants
Frame
AirBlade Intrepid v2 40 € FC
AIKON F4 MINI2020 + OSD 30 € ESCs
1 x AIKON AK32PIN 4IN1 35A 6S 60 € Moteurs
4 x EMAX RS1606 - 3300KV 56 € Jeu d'hélices
1 x HQPROP DP 4X4.3X3 V1S 3 € Caméra FPV
Caddx Tarsier 105 € Émetteur vidéo
AKK FX3-ultimate 17 € Antenne vTx
Realacc RHCP Super mini UXII Stubby 5.8GHz 6 € Récepteur radio
R9 MM 25 € LiPo
BATTERIE LIPO TATTU 4S 850MAH 75C (XT30) Prix total : 342 €
-
Micro Alien 3" HD Midrange/Freestyle
Micro Alien 3" HD Midrange/FreestyleHello,
Pour ce second build, il va s'agir d'un 3". Dans l'optique d'avoir un mini kit FPV à trimbaler facilement (avec X-lite + lunettes) et pouvoir filmer un peu en HD.
J'en ai quand même bien chié pour tout faire rentrer proprement, mais c'est passé, même le buzzer !
Côté composants, je me suis un peu lâché, vu mon niveau, on peut dire que c'est donner de la confiture à un cochon... mais j'aime bien la confiture
J'en profite pour faire un retour sur quelques composants qui sont assez récents et pour lesquels on a pas forcément beaucoup de retours.
Frame : Micro Alien de ImpulseRC. C'est le point de départ, j'ai eu un coup de cœur pour cette mini frame mignonne comme tout, avec la batterie au dessus et des bras séparés (au delà de la maintenance, je pense que pour limiter les vibrations c'est un bon point).
FC : Talon F7 Mini de CLRacing/Heli Nation. Vu le prix et le confort du F7, notamment pour l'inversement des signaux, pourquoi se priver ! Niveau fonctionnalités, elle a tout comme un modèle format standard ! Mon inquiétude concernait la doc, à part un schéma, on a rien... mais en même temps, j'ai pas eu de souci
Là où j'ai douté c'est que ImpulseRC conseillait fortement un gyro MPU6000 et que les gyros récents étaient victime de bruit. J'ai fait confiance à Joshua Bardwell qui indiquait dans sa reviews de la FC au format standard :
CitationICM series gyros was known to have noise issue, and everyone suggests using MPU6000 gyro for this reason. So why did CL Racing go with this seemingly “bad choice”?
Well, it turns out the noise problem associated with ICM gyro’s in the past was caused by poor hardware design – bad power supply to the gyro without proper decoupling.
CL Racing reassured me that they’ve eliminated this noise issue. I will report back once I have tested it.
La caméra FPV/HD : Foxeer Mix ! Elle était beaucoup attendue. Je n'ai pas eu l'occasion d'essayer les Split ou Turtle, donc je n'ai pas d'élément de comparaison, mais j'ai été très agréablement surpris par la HD. Alors oui, il y a des artefacts de compression, c'est un peu trop sharp et la distorsion est importante. Mais il y a des choses qui se corrigent en post-prod, d'un point de vue ergonomie, l'enregistrement automatique à l'allumage, c'est du bonheur, c'est hyper fluide et elle se débrouille bien avec la gestion de la lumière. L'objectif est un peu proéminent.
VTX : TBS Unify Pro32 Nano 5G8. Comme je l'ai indiqué dans ce post, il m'a bien fait galérer pour le Smart Audio, qui est en version 2.1 et donc pas officiellement supporté par Betaflight (mais dispo en dev). Il chauffe fort, même en 25 mW, mes doigts ont souffert pour l'unlocking. Il est minuscule, donc au top pour les builds compacts. Niveau qualité, j'ai quelques réserves, mais je pense que c'est plus lié à mon antenne et son positionnement.
RX : R9 Mini de FrSKY. Je voulais pouvoir prendre un peu de distance sans m'inquiéter du signal. Je suis passé en firmware Flex pour pas être emmerdé avec certaines contraintes de Mode/télémétrie. Et je l'utilise en F.Port, ça marche nickel, on gagne un câble et un UART et je crois que c'est un chouilla plus rapide. Quelqu'un a une idée du connecteur d'antenne utilisé ? Je pensais que c'était de l'U.FL, mais celle que j'avais achetée avait un connecteur trop grand, du coup j'ai utilisé celle vendue avec, il existe un format "ufl mini" ?
Moteurs : Rotor Riot Hypetrain Brat 1407 4140kv. Ils sont effectivement très smooth. J'ai dû raccourcir les vis car certaines frôlaient les bobines des moteurs.
Voilà pour l'essentiel. J'ai 2 petits soucis qui restent, peut-être aurez-vous des idées/conseils :
- Le retour dans les lunettes est moyen, c'est vraiment moins bon que mes Swift2. Il y a une sorte de scintillement, mais pas vraiment de glitch. A puissance égale, j'ai aussi moins de portée qu'avec un Tramp. Est-ce que ça pourrait venir de l'antenne, qui est pratiquement intégrée au châssis au lieu de franchement dépasser ? Et est-ce que le fait qu'elle se trouve pile poil sous la pigtail XT-30 peut engendrer ce genre de soucis ? Malheureusement, j'ai merdé avec le DVR pourri des EV200D et l'enregistrement n'a pas tourné.
- J'ai un pin de contrôle de l'OSD (émulation du joystick). J'arrive à ouvrir le menu de la cam, monter, descendre, et quitter. Par contre, impossible de sélectionner quoique ce soit (le stick de gauche n'a aucun effet). Une idée ? Au passage : si le pin OSD est connecté à la FC, si on branche la petite télécommande filaire sur le connecteur, celle-ci ne fonctionne pas, il faut dessouder le fil de l'OSD.
J'ai bien galéré sur ce build, mais le résultat est vraiment sympa (si je pouvais améliorer le retour dans les lunettes, ça serait parfait). Il me reste encore à faire une petite étanchéfication partielle et ça sera au poil.
Je l'ai testé avec des lipos de 450, 650 et 850 mAh. C'est sans hésitation que je préfère ces dernières. Le quad a plus d'inertie et l'autonomie est pratiquement doublée.
Pour illustrer tout ça, voici le maiden fébrile du moustique (et de la X-Lite du coup), c'est pas du grand art, mais c'est mieux que rien
Youtube fait un carnage à l'encodage, j'ai mis une version courte et moins compressée sur Vimeo pour mieux faire honneur à la Foxeer Mix. L'original est nettement meilleur, je peux le mettre à dispo si ça en intéresse certains.










POIDS : 157 grammes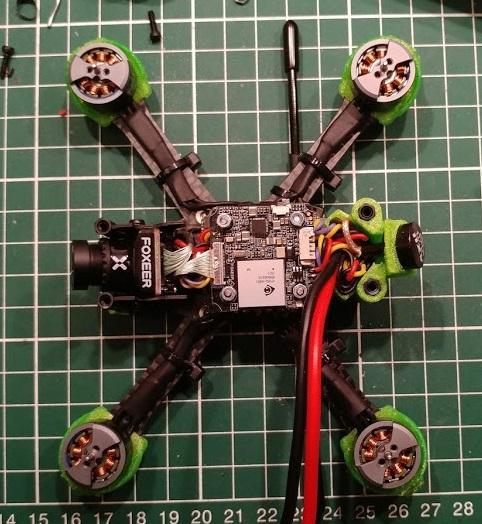
Liste des composants
Frame
IMPULSERC MICRO ALIEN 43 € FC
TALON F7 MINI 38 € ESCs
1 x AIKON AK32PIN 4IN1 35A 6S 60 € Moteurs
4 x ROTOR RIOT HYPETRAIN BRAT 1407 4140KV 72 € Jeu d'hélices
1 x HQ Durable Prop T3X3X3 2 € Caméra FPV
FOXEER MIX MINI CAMERA HD 70 € Émetteur vidéo
TBS UNIFY PRO32 NANO 5G8 32 € Antenne vTx
LUMENIER ANTENNE AXII U.FL 5.8GHZ - RHCP 22 € Récepteur radio
FRSKY R9 MINI EU 20 € LiPo
BATTERIE LIPO TATTU 4S 850MAH 75C (XT30) Prix total : 359 €
-
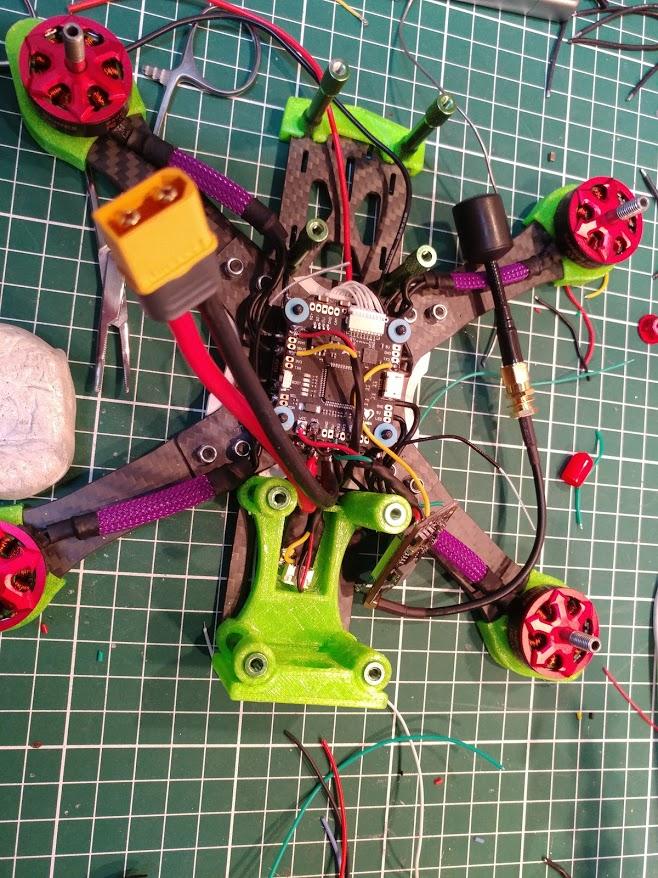
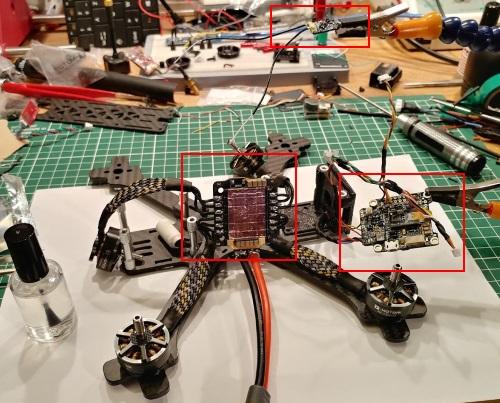
Xbee 230 v3 sous FalcoX (EmuFlight maintenant)
Xbee 230 v3 sous FalcoXHey les pilotes !
J'avais dis que j'arrêtais pour cette année, mais la hype a eu raison de moi
On se retrouve pour un build sous FalcoX. Mes quads volent pas trop mal dans l'ensemble, mais comme je n'ai jamais eu l'occasion de voler sur un quad vraiment super bien tuné, je n'ai pas vraiment de référence.
A force d'entendre dire que FalcoX vole nickel de base grâce à ses presets, j'ai craqué et j'ai mis toutes les chances mon côté en montant une config qui a fait ses preuves sur le preset BlackBird, en 4S, avec des bons moteurs, une bonne frame... Setup très proche de Farouk FPV et CrAzY FPV (que je remercie au passage pour ses bons conseils !)
Avant de partager mes retours, un edit à l'arrache du maiden
Alors ? Aucun de mes quads ne vole si bien, pas de vibrations, pratiquement pas de propwash, retour vidéo parfait : le filtrage est top.Donc clairement, ça vole très bien de base (pour mon setup), à part un petit rebond sur le roll et le pitch sur les mouvements très rapides (une petite montée des P devrait faire l'affaire), c'est super. L'assistant pour la config se déroule sans problème, le full connecteurs, même si j'étais un peu réticent au départ, j'avoue que c'est hyper pratique !
Mais tout n'est pas parfait :
-
Je suis peut-être passé à côté, mais je n'ai pas vu d'alerte dans l'OSD ou via buzzer. Du coup, comme je n'ai pas fait gaffe par habitude, j'ai descendu 2 lipos entre 2.8/3.0V par cellule

- Pas de configurateur digne de ce nom
- Je n'ai pas pu reproduire parfaitement la courbe de mes rates. J'ai testé 3 convertisseurs différents mais c'est pas nickel. Ca paraît bête, mais je trouve ça con de ne pas pouvoir avoir les mêmes rates que sur mes autres quads ou que sur le simu. Même si ça s'en approche, je sens la différence.
- Derrière la façade du "tout marche bien et facilement", ça ne s'adresse pas aux débutants. Le gyro est extrêmement sensible, le build doit être sain (j'y reviendrai) et tout doit être parfait pour pouvoir enchaîner sur l'assistant de configuration, un grain de sable dans l'engrenage, et c'est la merde.
- Tout de même des petits rebonds avec le preset
- ESCs... Je le mets ici, parce que c'est un Megabolt Freestyle (donc FL1). Le filtrage est parfait sur ce modèle. Par contre, j'ai un modèle du premier batch, j'ai dû faire une soudure bien galère, c'est très moyen (j'y reviendrai aussi). J'ai fais 2-3 lipos en DShot64 avant de voir le quad décrocher sur un mouvement un peu brutal. Bref, dommage. Je suis repassé en DShot32 et je n'ai pas rencontré ce souci à nouveau.
Ce build a été vraiment très intéressant : FalcoX est assez exigeant et ça m'a forcé à faire attention à beaucoup de choses pour obtenir un quad le plus sain possible. Et ce sont des pratiques valables pour n'importe quel build
. L'idée est d'éviter au maximum les vibrations et les interférences électromagnétiques :
- FlightOne recommande de monter la FC à l'envers pour éloigner le MCU des ESCs (4en1)
- Il faut utiliser les soft mount livrés (les gummies) et pas les stand offs antivibration (qui laissent passer plus de mouvements) que j'utilisais pourtant souvent.
- Espacer autant que possible les cartes
- Ne pas avoir de fil qui passe près du gyro, idem près du MCU
- Ne surtout pas serrer la stack. FlightOne recommande même de ne pas mettre d'écrou au dessus de la FC !
- Utiliser des rondelles caoutchouc en tant qu'espaceurs
- Ne pas coller le RX et le VTX
- Ne pas croiser les antennes du RX et VTX
- Eviter d'avoir des fils avec de gros courants (pigtail, fils moteurs...) qui passent à côté des composants sensibles, antennes ou même autre fils
- Normalement, il ne faut rien mettre au dessus de la FC (comme un VTX) pour éviter vibrations et perturbations électromagnétiques (là j'ai rusé, j'y reviens après)
- Filtrer fort ! (Megabolt Freestyle avec son extension de condos + 2 condos 35V 1000µF)
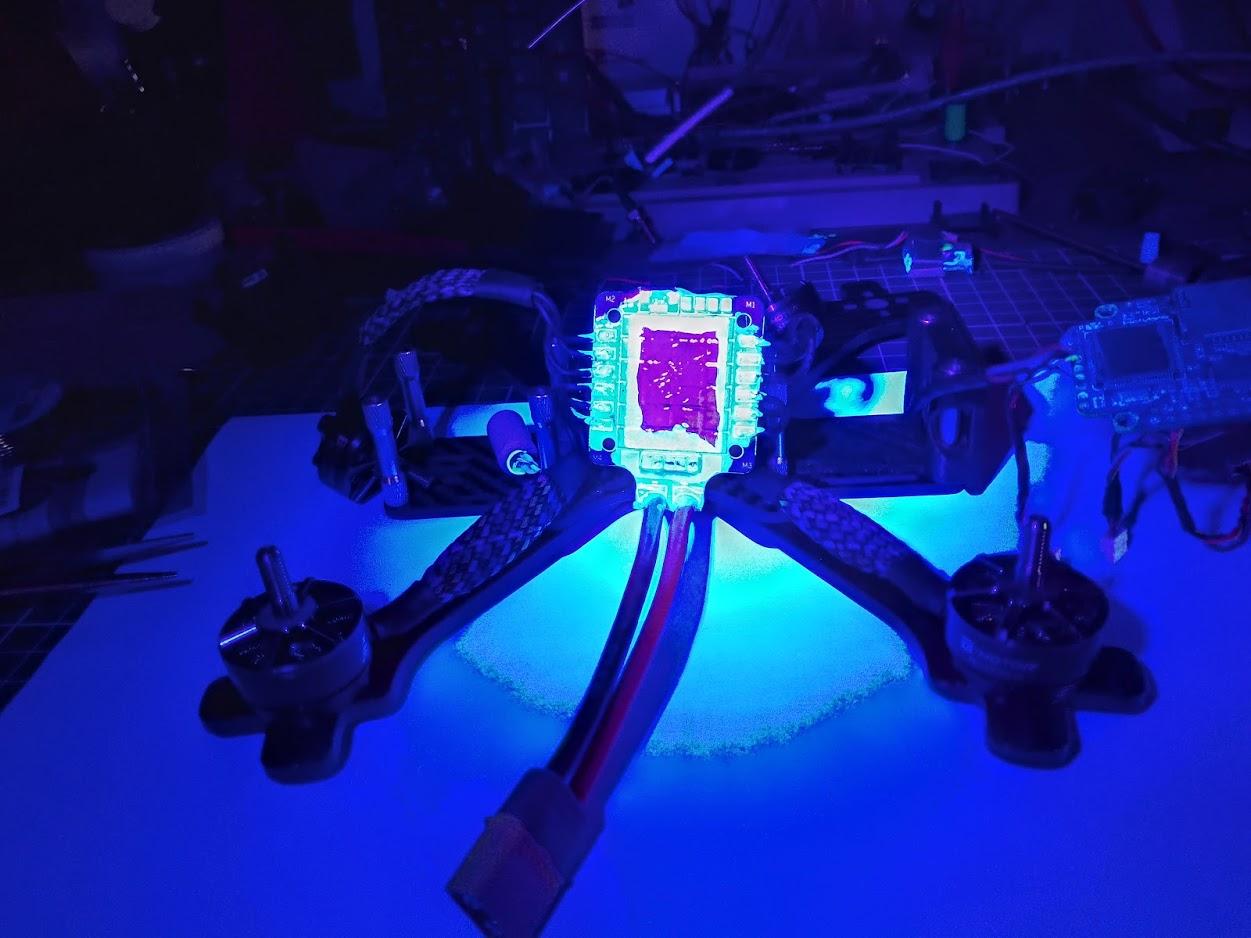
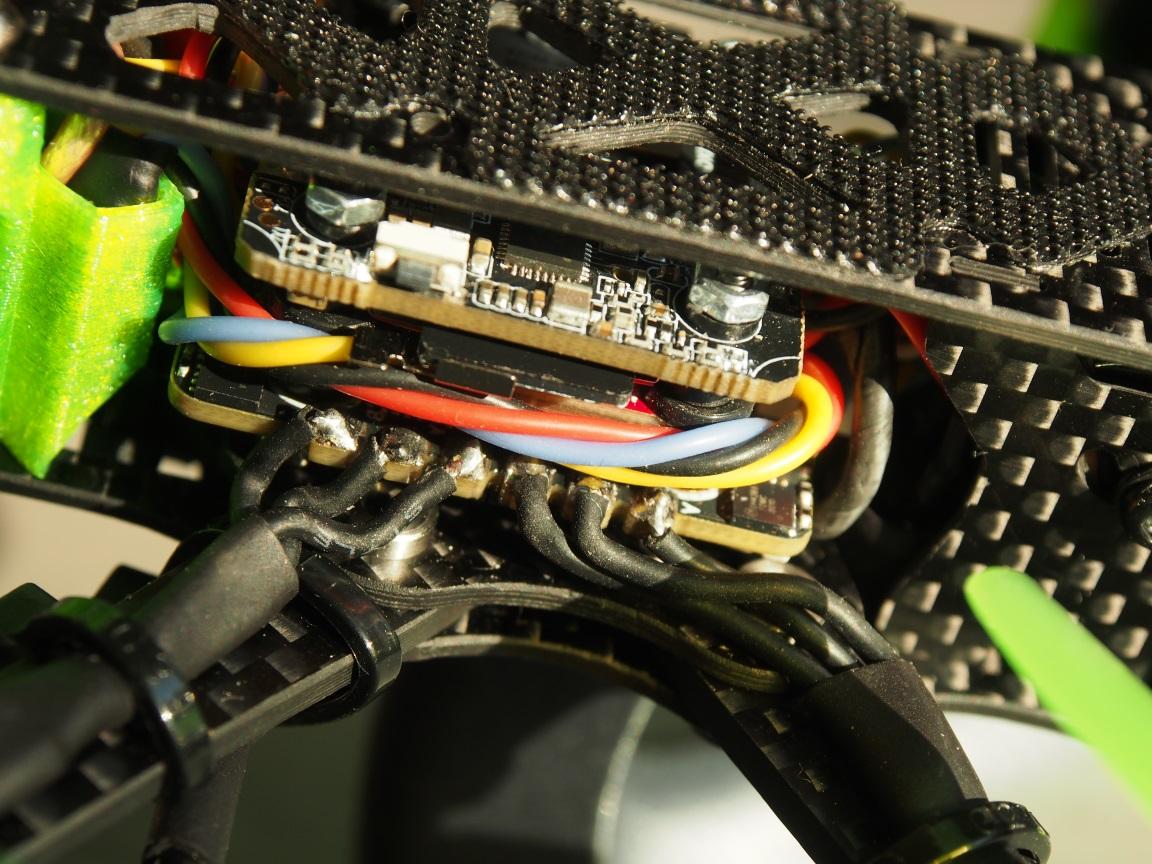
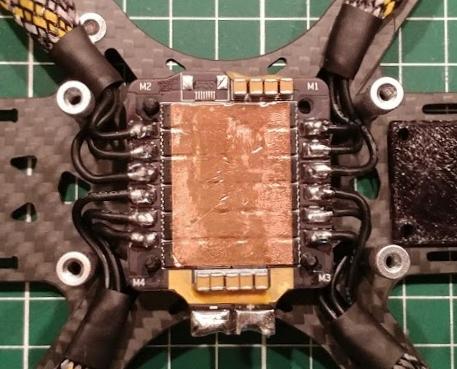
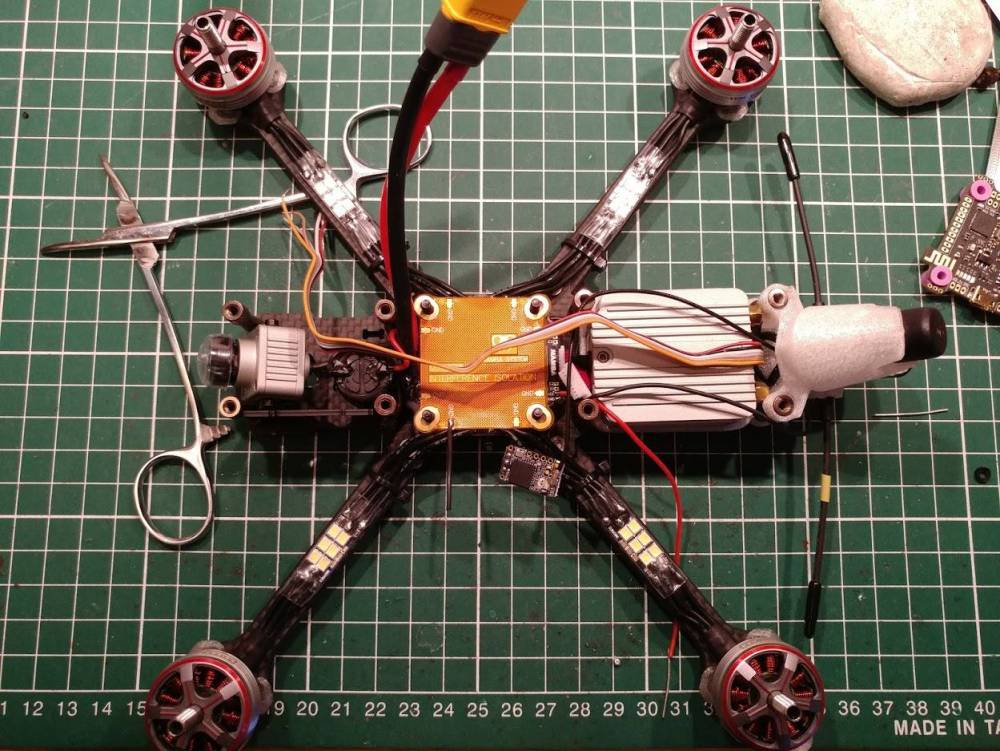
Dans le Xbee 230, je n'ai pas masse de place en longueur, il me fallait donc caser le VTX au dessus de la FC, malgré les recommandations de FlightOne :
- Pour éviter les vibrations, j'ai mis un petit spacer à visser au dessus de la FC, mais qui ne touche pas les gummies, avec un point de colle pour que ça ne bouge pas.
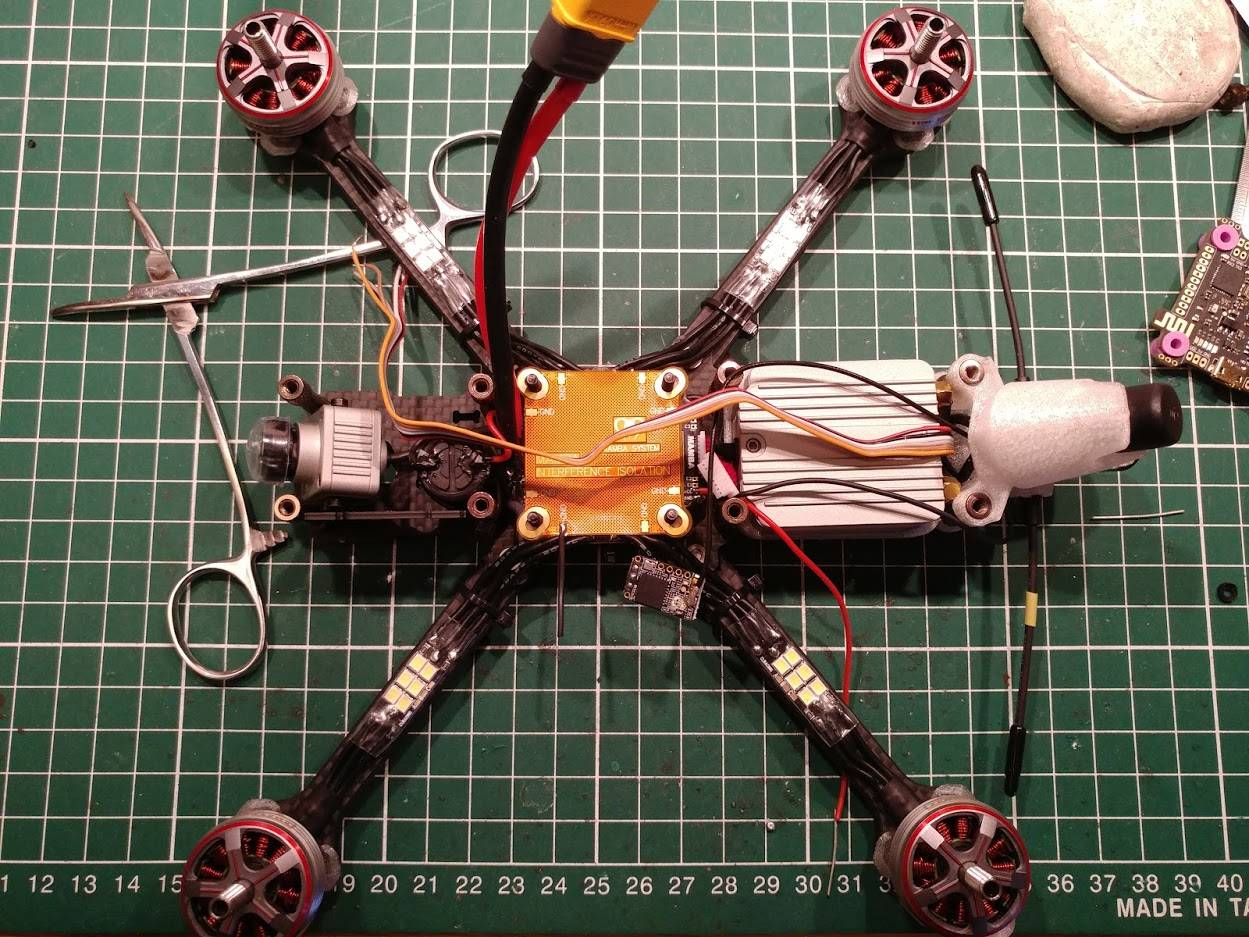
- Pour les perturbations électromagnétiques, j'ai découpé un carré dans une feuille de MuMetal et je l'ai coincé entre 2 plaques en TPU en 30.5*30.5. Le MuMetal a une très forte perméabilité magnétique et protège le MCU des interférences. Le TPU évite tout risque de court-circuit en cas de contact avec une des cartes. Je n'ai jamais vu ça dans un quad, mais quand je bricolais des petits robots, c'est le seul moyen que j'avais trouvé pour que les moteurs ne perturbent pas la boussole électronique (cg. photo plaque orange en PJ).














Liste des composants
Frame
Xbee 230 v3 99 € FC
FlightOne Revolt OSD 45 € ESCs
1 x Megabolt Freestyle 70 € Moteurs
4 x T-Motor BlackBird Edition 2207 2725Kv 112 € Jeu d'hélices
1 x AzurPower Johny 4838 3 € Caméra FPV
Foxeer Falkor 2 Mini 30 € Émetteur vidéo
AKK Infinite DVR VTX 20 € Antenne vTx
Triumph Team Blacksheep 5 € Récepteur radio
FrSKY R9 MM 25 € LiPo
Cnhl - 1500MAH 4S 100C Black Series Prix total : 409 €
-
Je suis peut-être passé à côté, mais je n'ai pas vu d'alerte dans l'OSD ou via buzzer. Du coup, comme je n'ai pas fait gaffe par habitude, j'ai descendu 2 lipos entre 2.8/3.0V par cellule
-
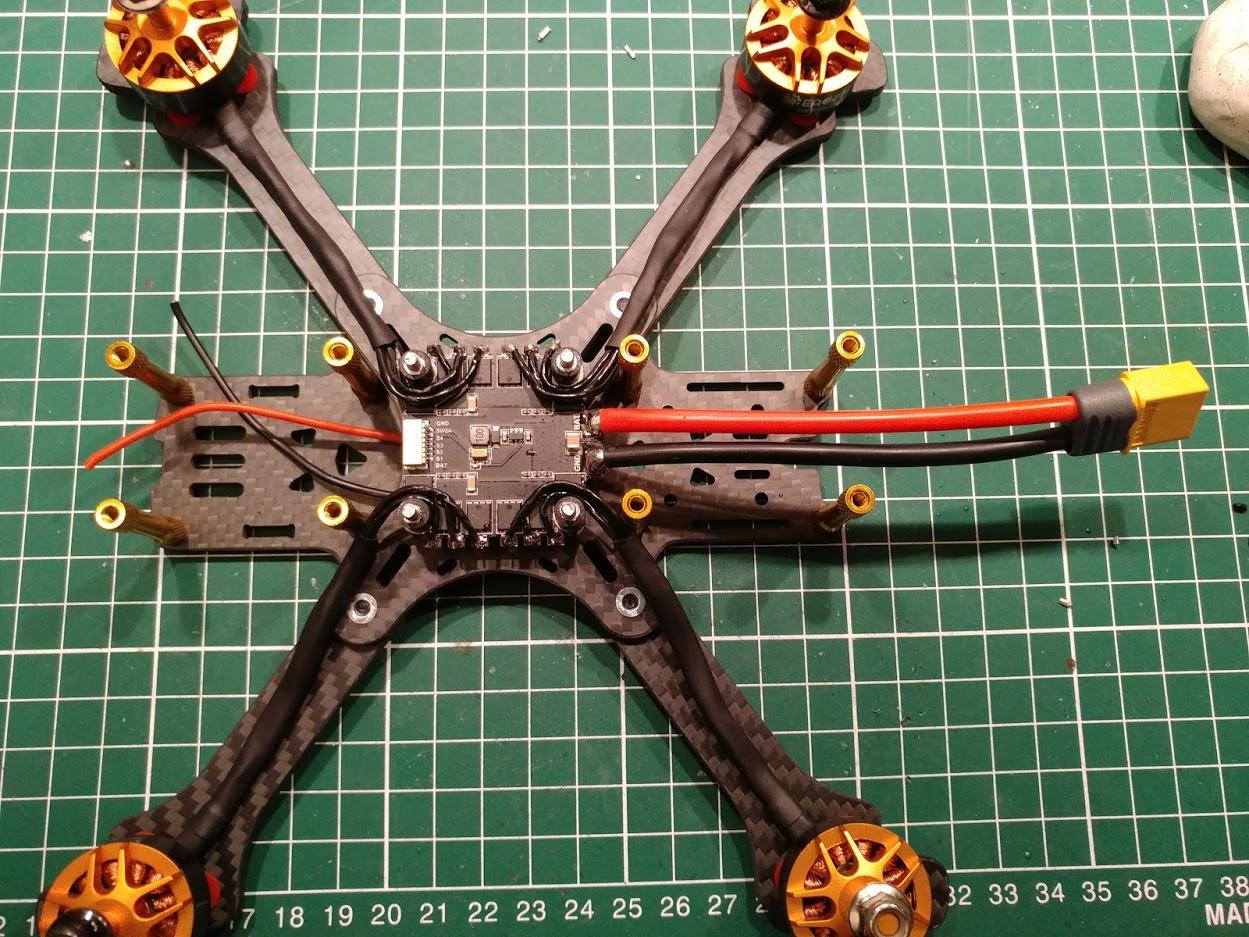
SourceOne Rebirth (Mamba F722S)
SourceOne Rebirth (Mamba F722S)Salut tout le monde,
Je n'avais pas prévu de poster ce "rebuild" (d'où les photos moins jolies que d'habitude). Mon bon vieux SourceOne (sous Kakute F7) ayant eu quelques mésaventures récemment, je devais changer les ESCs, finalement j'ai changé la stack entière et tout rebuildé. Je poste quand même, ça sera l'occasion de faire qques retours : le combo SourceOne + Mamba F722S + Emax Eco Series (même si j'ai gardé mes F40 Pro2) est super intéressant pour une machine milieu de gamme à bas coût, j'y reviendrai à la fin.
Comme d'hab, avant de rentrer dans les détails, une petit vidéo des tests de la première session d'hier (y a de tout, avec filtres stocks, moins de filtres, antigravity on/off etc
) :
Le gros changement, du build, c'est la stack. Je devais changer les ESCs, mais vu le prix de la stack Mamba F722S (récemment passée en revue par WAF), c'était l'occasion d'aller au plus simple, tester autre chose, me débarrasser du Gyro sofmount proéminent de la Kakute F7 pour un bon vieux MPU6000 qui a fait ses preuves, et globalement, de faire les choses plus simplement pour une maintenance facilitée (c'était mon tout premier build à "l'époque").
Stack Mamba F722S
@Motard Geek a dit l'essentiel dans sa review, j'ajouterais juste quelques petits détails :
- Il n'y a qu'un seul pad VBAT de dispo, pas super bien placé (sous la nappe qui part vers les ESCs)
- En contre partie, on a du 9V de dispo, j'ai donc alimenté mon VTX en 9V, ça permet d'avoir une double dose de filtrage (aucun souci pour alimenter Cam + VTX + RX)
-
Les 2 nappes fournies sont courtes, ce qui empêche tout changement d'orientation des ESCs 4-en-1, et j'aime bien faire sortir la pigtail sur le côté : on gagne de l'espace à l'intérieur de la frame, et on éloigne au plus tôt cette source potentielle d'interférences électromagnétiques du reste de l'électronique. Comme des pads de soudures sont disponibles, il reste possible de faire sa propre connectique, mais je suis fainéant, j'aime bien les nappes
- Contrairement à la Mamba F405, où il faut faire attention à ne pas trop serrer les écrous au dessus des softmounts pour ne pas les compresser, ici, ça a été l'inverse : j'avais un peu de jeu entre les FC et le haut/bas des softmounts. Ca s'est tout de suite vu en vol, j'ai resserré les écrous en m'assurant d'avoir un contact, sans pour autant trop serrer bien sûr.
- Comme dit dans la review, elle est plutôt low profile, donc plus de souci avec le strap (la v3 de la SourceOne a déplacé la sandwich plate au dessous, ce n'est donc plus un prbl, mais je suis toujours en v0.2)
- Elle est listée dans les FC qui supportent directement le RPM filter. Pour le moment je suis sous EmuFlight, mais si la 4.1 de BF s'avère géniale, je serai paré (ce qui n'était pas le cas avec la Kakute F7)
Je ne sais pas si ça apporte vraiment qque chose, mais j'ai ajouté un pad anti-interférences entre la FC et les ESCs.
TBS Source One
J'adore vraiment cette frame. C'est pas une copie, elle vole bien, elle est assez robuste, la dernière itération (que je n'ai pas) a des nouveautés sympa (stack 20x20 à l'arrière, plus de place en hauteur sur la stack principale, bras renforcés...), mais surtout :
- elle coûte moins de 30 balles (en France !)
- il y a toujours du spare de dispo
- les bras, même de la dernière version sont rétrocompatibles
Bien sûr, elle n'a pas les finitions d'une frame haut de gamme, ni les subtilités de design (stack isolée des bras etc.) de certaines autres frames, mais elle fait bien le taf, et on a pas peur de la péter, parce que si ça arrive, c'est pas grave
LEDs
J'avais des leds à l'arrière, elles ont dégagé, ça faisait des fils qui traversait le BUS sans aucun intérêt autre que l'esthétique. Mais comme j'ai mis des RaceWire Leds sur les bras, j'ai toujours des LEDs, les fils en moins et la maintenabilité des moteurs en plus
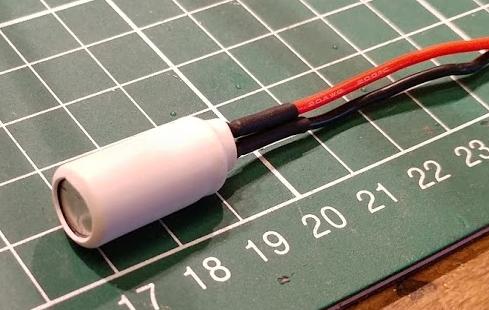
ViFly Finder
Comme on peut le voir sur les photos, il y a un pauvre beeper de base accroché au dessus du condo, il prend 0 place et j'ai toujours un switch pour faire bipper l'animal. Les fils de mon ViFly Finder étant très abîmés, il a dégagé. S'ils avaient mis des pads de soudure, je l'aurais sans doute repris, mais là c'était galère. J'ai maintenant une tonne de place à l'arrière du quad, ce n'est pas exclu que je prenne un ViFly Beacon (sachant que j'aurais le beeper classique toujours dispo sur un switch), niveau connectique, ça sera plus ergonomique
.
Optims bando
J'ai ajouté des patins (RR kwad skids) pour pouvoir me poser/glisser comme un cochon sur du dur. Et comme @AeroSoap me l'avait conseillé, j'ai viré les protections que j'avais autour des moteurs (qui on tendance à emmagasiner les merdes quand on vole dans des endroits pas très clean).
Moins de TPU / plus de maintenabilité
On continue dans l'économie de TPU pour gagner en poids. Et accessoirement en ergo. Dans ma "stack arrière" tout était packagé dans du TPU, mais rien n'était accessible, il fallait tout démonter. Là le VTX et le RX son parfaitement accessible, faciles à démonter/remplacer indépendamment (il y a du Ummagrip en dessous pour bien les caler et absorber chocs et vibrations).
Au final 30-40 grammes de gagnés (bon, c'était vraiment une enclume, il ne devient pas léger pour autant
).
Même si mon quad sous FalcoX vole objectivement mieux, j'adore celui-ci, je suis beaucoup moins dans la retenue, pour l'instant c'est toujours avec lui que je suis le plus à l'aise
Dans la liste des composants, j'ai joué le jeu en mettant ce qui est vraiment dedans, mais avec qques ajustements, on peut avoir une super machine pas chère et évolutive :
- TBS Source One v3 (30€)
- Mamba F722S (70€)
- Emax Eco Serie (40€)
- R-XSR (20€)
- VTX AKK/Eachine (15€)
- Foxeer Razer (20€)
==> 195 €



POIDS : 400 grammes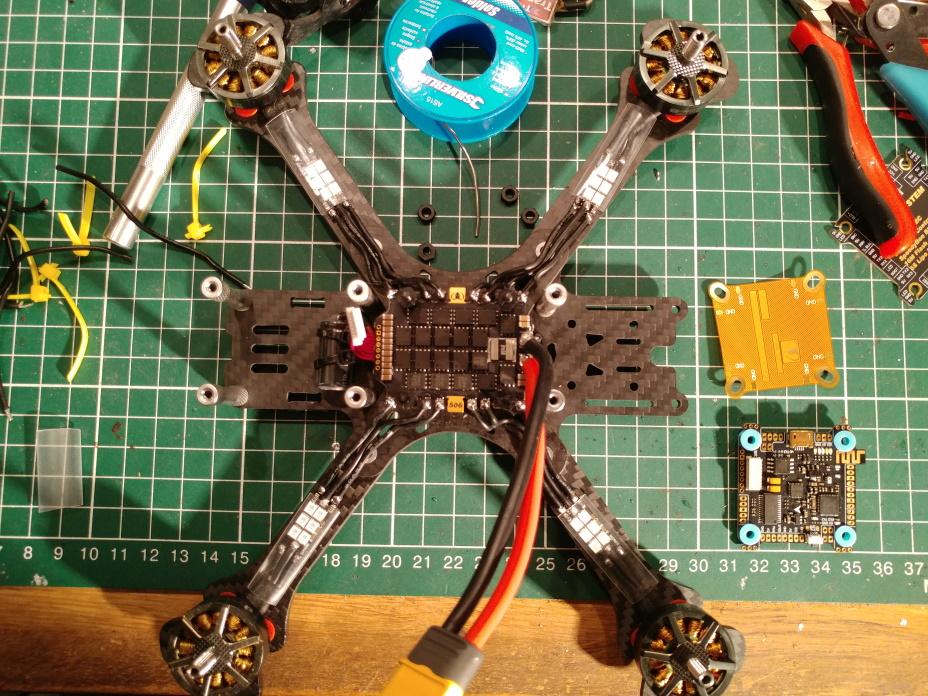
Liste des composants
Frame
TBS Source One 30 € FC
Mamba F722S 67 € ESCs
Avec la FC Moteurs
4 x T-Motor F40 Pro2 (discontinued) 84 € Jeu d'hélices
1 x HqProp Ethix S4 3 € Caméra FPV
Caméra FPV RunCam Swift 2 (2.3 mm) 29 € Émetteur vidéo
ImmersionRC Tramp HV 30 € Antenne vTx
Foxeer 5.8G Lollipop 9 € Récepteur radio
FrSKY R9 MM 24 € LiPo
Cnhl - 1500MAH 4S 100C Black Series Prix total : 276 €
-
Tadpole Twins
Tadpole TwinsSalut,
Un peu de compagnie pour le Tadpole de @Joelamoule (que je remercie encore de m'avoir entraîné dans cette ruine), avec ces jumeaux
C'est un double build parce que j'en ai fait un pour le Noël du frangin.
J'avais beaucoup aimé l'Emax TinyHawk Freestyle, celui-ci s'en rapproche fortement, en version plus haut de gamme (frame, moteurs, caméra, une vraie stack...).
Je voulais, si possible, rester en 2S et ça va, ça le fait bien ! J'ai testé avec des 2S 450 mAh (28g) et des 650 mAh (31g), les 2 passent très bien, avec une autonomie de 4 minutes en moyenne malgré le froid. Je perds une à 2 minutes comparé à l'Emax qui pesait 10g de moins.
L'avantage d'en avoir 2, c'est que j'ai mis BF sur l'un et EmuFlight sur l'autre. Le test de BF a été très bref, j'avais des petites oscillations sur le Yaw. Avant de chercher à tuner, j'ai testé celui avec Emu 0.2.0-RC1, avec le preset "TinyHawk Freestyle", et ça volait bien. Ca sera donc Emu pour ce quad
Il est mignon comme tout, on dirait une Marmote/Gecko en modèle réduit, il y a une vraie stack, la caméra change tout comparé au ToothHawk, les hélices sont pratiquement invisibles dans le feed video (surtout avec des hélices noires).
La frame est très spacieuse, je n'ai pas eu de difficulté à tout loger à l'intérieur, y compris le condo et le buzzer. C'était un build assez facile, alors que d'habitude j'en chie bien sur les 3-4". Le seul truc qui a été relou, ça a été la visserie : les vis moteurs étaient trop longues et les vis pour la stack en plastic tout mou m'ont pas du tout inspiré. Du coup j'ai tout remplacé et coupé chaque vis de la stack à la longueur nécessaire (vive la Dremel
)
Le VTX Back Pack d'Oscar Liang, qui normalement se positionne à l'arrière d'une caméra est nickel : les trous sont adapté au format 16x16 de la stack Mamba (j'ai pas fait exprès
), en plus il embarque un micro
Le R-XSR est en F.Port, pour ne pas changer les bonnes habitudes
J'ai acheté une tonne d'hélices différentes (en tripales et bipales), pour l'instant je n'ai testé qu'avec les tripales Emax Avan Rush, c'est à peine si on l'entend tellement il est silencieux !
Un petit extrait, désolé pour la qualité du DVR, l'image est loin d'être aussi bonne que celle que j'avais dans les lunettes et j'ai l'impression qu'il va pas bien (perte de frames, certains passages sont accélérés pendant 1 seconde) :
Je rajoute la 2ème vidéo postée plus bas :




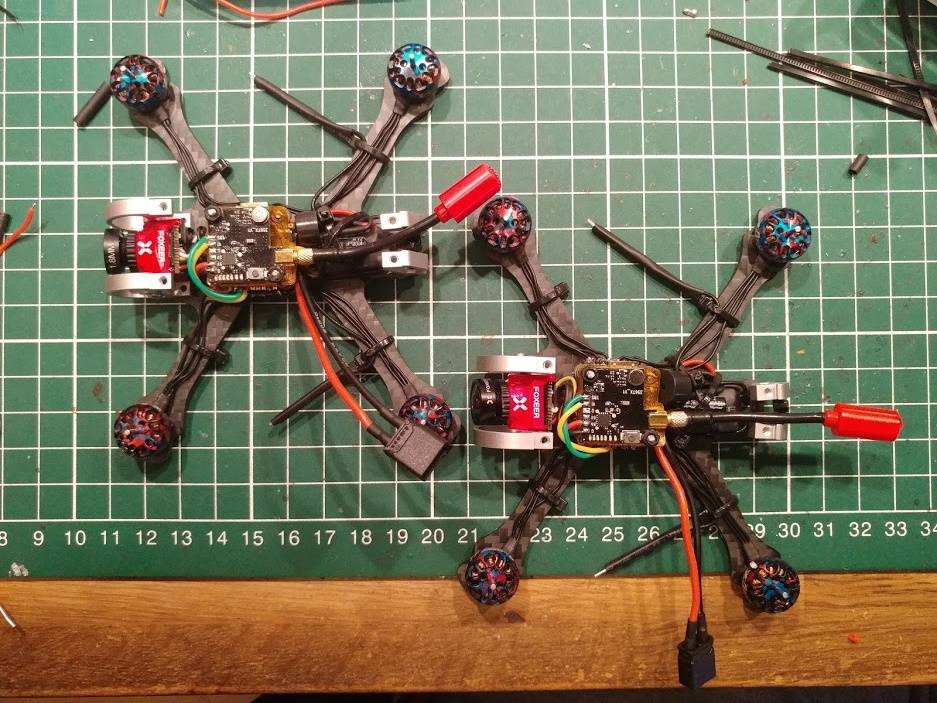


POIDS : 63 grammes
Liste des composants
Frame
Armattan Tadpole (black friday, mercu Joelamoule) 25 € FC
Diatone MAMBA F411 MPU6000 Dshot600 & 2-4S STACK BEC 5V / 1.5A 35 € ESCs
4 x En stack avec la FC Moteurs
4 x iFlight XING NANO X1103 48 € Jeu d'hélices
1 x Emax Avan Rush 2 € Caméra FPV
Predator 4 Nano (avec pad de soudure) 33 € Émetteur vidéo
Oscar Liang AKK back pack VTX 12 € Antenne vTx
EMAX Nano 7 € Récepteur radio
FrSky R-XSR 19 € LiPo
Gaoneng 7.6V 650mAh 60C 2S HV 4.35V Prix total : 181 €
-
Double AK47-HD
Double AK47-HDHello !
Je vais essayer de ne pas faire une trop longue dissertation pour changer
(edit : désolé ^^)
Après une année 2019 sous le signe de la diversité à tester différentes configs : true X, wide X, 2207, 2306, bas kv, hauts kv, je sais à peu près ce que je veux et cette année sera à l'unicité ! Voler avec 4 setups 5" complètement différents c'est pas hyper confortable pour la progression ! En prime, c'est l'occasion de migrer vers la HD et le 6S !
Moteurs : 2306 - 1750 KV
Taille du stator : 2306, c'est définitivement ce qui me plait le plus, je préfère avoir du contrôle et de la réserve en bas que du punch en haut, l'augmentation des kv compense un peu. Des 2207 en 6S compenseraient probablement un peu le couple en bas, mais ça sera du 2306, épicétou
KV : 1750Kv, c'est assez standard en 6S, du mid KV quoi, pourtant mais c'est l'équivalent de ce que l'on considérait comme du relativement haut KV en 4S.Pour moi, c'est le compromis idéal
Le premier quad est équipé des nouveaux haut de gamme de chez Amax, les World Master 2306. Amax a bonne réputation sur les moteurs, mais honnêtement, j'ai fait ma fashion victim : je les ai choisis pour leur design... il s'accorde parfaitement avec le Air Unit et la la caméra DJI Le second est en T-Motor F40 Pro II, j'ai aimé ces moteurs en 4S, donc je continue, surtout que le pack de 4 à 75€ est assez intéressant (et ils respectaient aussi le code couleur du 2nd quad ).
Frame : AK47 HD de la Team Mistral
C'est une frame qui m'attire depuis longtemps, en version classique. Je ne pouvais donc que sauter sur l'édition HD. J'aime beaucoup le comportement de mon XBee 230 en True-X et lipo en toilet tank, mais finalement, j'ai décidé de privilégier un châssis en Wide-X ("squished") pour limiter la visibilité des hélices sur le flux vidéo, et les bus sont pratiques.
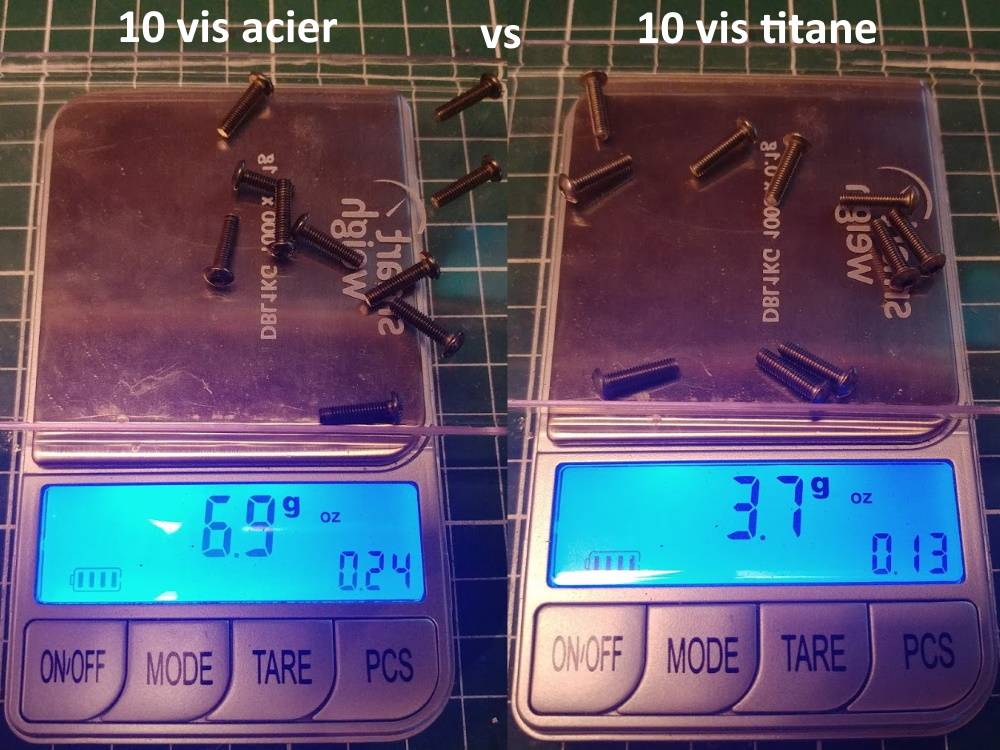
Je ne vais pas y aller par 4 chemins : ce châssis est sublime, le carbone est superbe avec son effet "silky", des bras relativement fins mais hyper épais (6 mm) apportent robustesse, rigidité et une bonne pénétration dans l'air. Le design est bien pensé et "simple", dans le bon sens du terme : je ne veux pas d'une frame complexe. J'aime bien avoir des side plates pour la caméra, le bumper en carbone est malin et le poids reste raisonnable. D'ailleurs, en remplaçant toute la visserie stock par des vis en titane, j'arrive au même poids que la version non HD (120g.), ça divise pratiquement le poids de la visserie par 2. Autre bon point, la Team Mistral fournit un ensemble de modèles à imprimer et ça c'est top !
Malgré tout, s'il faut chercher la petite bête, voici qques regrets, pour la plupart sans importance :
- pas de notice dans mes 2 boites, mais ça semble être une erreur, on la retrouve de toute façon sur le groupe FB et la vidéo de @Qnnk est parfaite
- espace très juste au dessus du air unit : j'ai pu y mettre le R9MM et le BEC 12V, mais pas dans de la gaine thermo, j'ai du me contenter de les entourer de ruban polyimide (Kapton), ça a le mérite de les isoler de la température du Air Unit en plus de les isoler électriquement
-
les designs des prints TPU sont superbes, mais 2 petites déceptions :
- le support du Air Unit avec les antennes stocks ne respecte pas la recommandation d'espacement avec le frame de 4cm, et ça rentre vraiment en force, pendant une heure, j'ai cru que ça ne rentrerait pas, n'osant pas trop forcer.
-
le support GoPro "hybride" me vendait du rêve : ça m'a toujours gonflé de devoir dévisser le support GoPro selon que je sois en Session ou Hero 6/7. En fait avec ce support hybride, ça ne change rien Les entretoises étant prises dans le TPU, pour changer de type de caméra, il faut donc au minimum retirer 4 vis et insérer le support sur les entretoises. Au final ça reste plus rapide d'imprimer 2 supports hybrides Si j'ai raté un truc, je veux bien qu'on m'explique.
J'avais dis pas de dissert, donc je vais juste lister qques points secondaires :
- Oui, dans un premier temps, j'ai mis des protections TPU sur les bras (+ 8g), trop de pognons dépensé pour prendre des risques, je les virerai peut-être plus tard, au moins sur l'un des 2, celui qui fera du bando les gardera
- J'ai lu des retours mitigés sur la fiabilité des stacks HD, j'ai donc opté pour ma stack favorite, la Mamba F722S, avec un BEC 12V pour le Air Unit. Le choix de cette stack me permet de mettre EmuFlight, et ça j'y tenais vraiment.
- Je suis parti sur des Tattu Rline v3 6S 1300 mAh 120C. J'insiste sur le v3. Elles sont pas trop lourdes, ont une patate énorme et apparemment elles sont vraiment durables contrairement aux versions précédentes. A noter que les 1050 mAh ne font que 10g. de moins, donc l'intérêt est assez limité.
- Comme d'hab, maintenant je mets toujours un shield Diatone entre les ESCs et la FC. Je ne sais pas si ça apporte qque chose, mais les stacks étant de moins en moins hautes, ça ne peut pas faire de mal, surtout pour 2€.
-
Je continue à mettre de RaceWire avec LEDs, ça n'ajoute pas de poids, pas de fils, mais ça permet d'avoir des LEDs. Evidemment, le code couleur est respecté pour les 2 builds
- Fixation de la stack "à la flightone" avec de longues vis de 25 mm, c'est efficace et solide, donc je continue comme ça
- L'enfer du condo... surtout en 6S, dans une frame pas haute et avec un Air Unit qui traîne. Pour le 6S on recommande du 1000 µF en 50V, mais je vois que tout le monde utilise du 35V. Je voulais éviter d'avoir un condo en extérieur ou sur le XT-60. J'ai finalement réussi à caser un 50V en vertical entre la caméra et la stack ! En hauteur ça passe de justesse, à 1-2mm près, mais en largeur c'est tranquille. J'ai tartiné le haut et le bas du condo de liquid tape pour éviter tout contact avec le carbone de la frame.
- J'utilise systématiquement un buzzer basique depuis qques builds : marre du ViFly Finder 2 qui prend bcp de place, 3 fils et qui est souvent inaccessible (ce qui force à rebrancher le XT-60 qques secondes pour l'arrêter == > c'est chiant et ça peut gêner les autres pilotes). Si nécessaire, j'ai un ViFly autonome que je peux mettre sur n'importe quel sangle lipo, tout en gardant le mini buzzer dispo sur l'inter.
Désolé pour la longueur, je m'arrête là.
Je vous épargne mon retour sur le DJI FPV System (déjà donné ici), je suis hyper content de ces machines, le maiden s'est passé comme sur des roulettes et je suis tellement content d'être passé en 6S ! fini les chutes de tension, quel bonheur !
Quelques extraits des 3 dernières lipos de la première session, après 2-3 lipos de tuning. Mes moteurs sont toujours froids, donc il y a de la marge (au passage, merci @Motard Geek pour les conseils) :















POIDS : 400 grammes
Liste des composants
Frame
AK47-HD 95 € FC
Stack Mamba F722S 73 € ESCs
4 x 4-en-1 dans la stack cf. FC Moteurs
4 x Amax WM2306-1750KV / T-Motor F40 Pro II 6S 1750 Kv 120 € Jeu d'hélices
HqProp Ethix S4 3 € Caméra FPV
DJI FPV (vendue avec le Air Unit) Émetteur vidéo
DJI FPV Air Unit (camera incl.) 189 € Antenne vTx
Antennes stocks du Air Unit Récepteur radio
FrSKY R9 MM 26 € LiPo
Tattu Rline v3 1300 mAh Prix total : 506 €
-
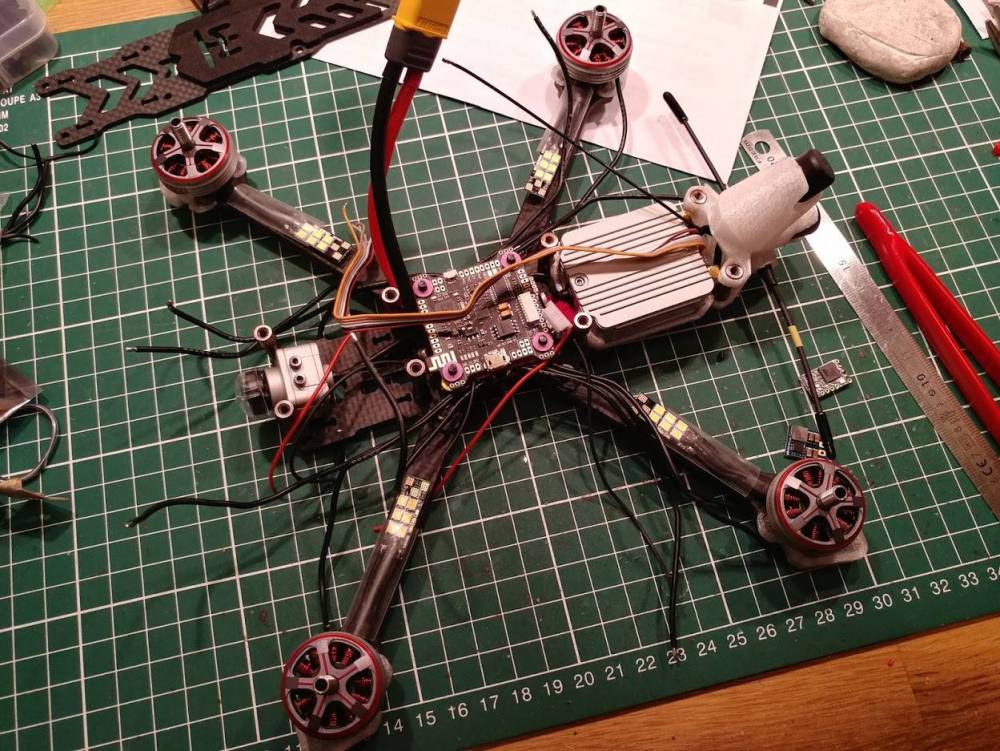
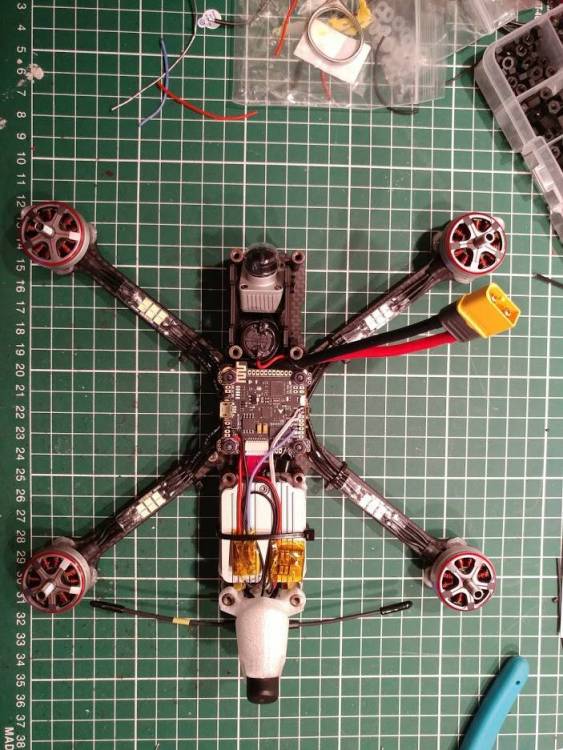
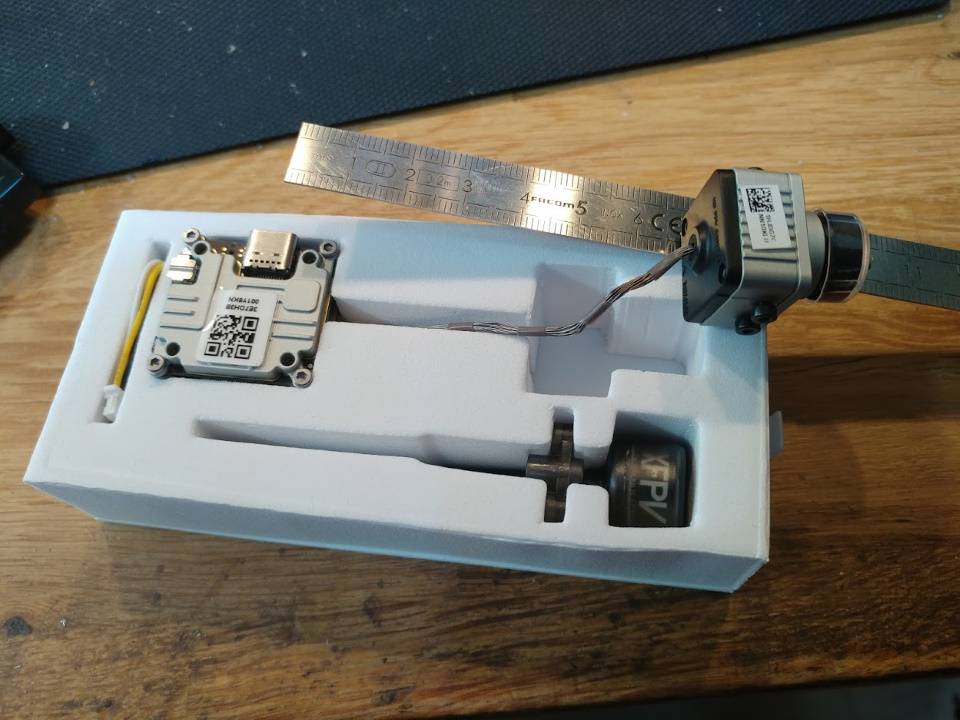
Intrepid v2 4" HD (Vista)
Intrepid v2 4" HD (Vista)Salut tout le monde,
Le fer à souder commençait à sérieusement me démanger, et après les 5" en DJI, je voulais convertir au moins un de mes 3-4" à la HD, c'est donc l'Intrepid 4" "maudit" qui s'est fait dépecer
A défaut de pouvoir faire le Maiden en extérieur, je l'ai fait dans mon garage, autant dire que la frustration était à son paroxysme : pas moyen de mettre un coup de throttle, le plafond est tellement bas que la gestion des gaz était vraiment galère, je pense que je dois tourner autour de 20-30%. Mais rien que pour la qualité du DVR , ça valait le coup
J'ai tout changé à part la frame et les moteurs. Ce quad m'avait toujours posé des soucis de vibrations. J'avais de fortes suspicions concernant les hélices, mais comme je ne le faisais jamais voler, je n'ai pas creusé (il était équipe d'une Tarsier, et avec le recul, dès qu'on a une GoPro à portée de main, la Tarsier n'a vraiment aucun intérêt en dehors des tiny/toothpick).
Sur ce Maiden je suis sur Emu 0.2.0, PIDs stock, filtres réduits et... nouvelles hélices : bye bye les oscillations relou, et il vole déjà très proprement (au delà de mes pouces en galère sur la gestion des gaz et le stress d'éclater la caisse d'un voisin
). J'affinerai les PIDs quand je pourrai faire des rolls et des flips sans risque.
J'en est profité pour remplacer la stack, non pas que la précédente posait problème, mais je suis tellement satisfait des Mamba F7 + BLHeli_32, qu'il a rejoint le reste de la tribu, c'était aussi l'occasion de tester la version Mini.
Difficile de faire un retour complet avec ces conditions de test très contraignantes, mais ça s'annonce bien, en résumé :
- Le Caddx Vista est vraiment compact et le retour dans les lunettes, un bonheur. Parfaitement adapté au 3-4".
- J'ai eu la version du Caddx Vista avec le câble court. Heureusement dans un 4", ça va, et j'ai finalement préféré le mettre à l'avant
- Le Vista est surélevé par un écrou + 2 rondelles silicone sous chaque vis, pour amortir les chocs en maintenant un bon flux d'air en dessous.
- Enfin je profite pleinement de ce châssis, l'absence des hélices dans la vue caméra permet d'avoir des DVR exploitables, une fois passé en superview et avec une pointe de contraste en plus, c'est assez chouette. La caméra DJI est intégralement protégée dans son habitacle
- Les 2 stacks rentrent quand même au poil de cul, j'ai dû pivoter les ESCs et remplacer la nappe de la stack pour pouvoir tourner la FC. La longueur des fils entre la FC et le Vista doit être de 1cm, la soudure a été sport, mais c'est propre
- Rien à dire sur la stack, toujours aussi efficace
- Condo 25V 1000µF, j'avais la place
-
Je gardes mes habitudes :
- R9 en F.Port
- RaceWire avec Leds
- shield anti-interferences entre les ESCs et la FC
- Suppression du ViFly Finder v2 au profit d'un simple buzzer
J'ai surtout hâte de le tester à son plein potentiel, vivement la libération !






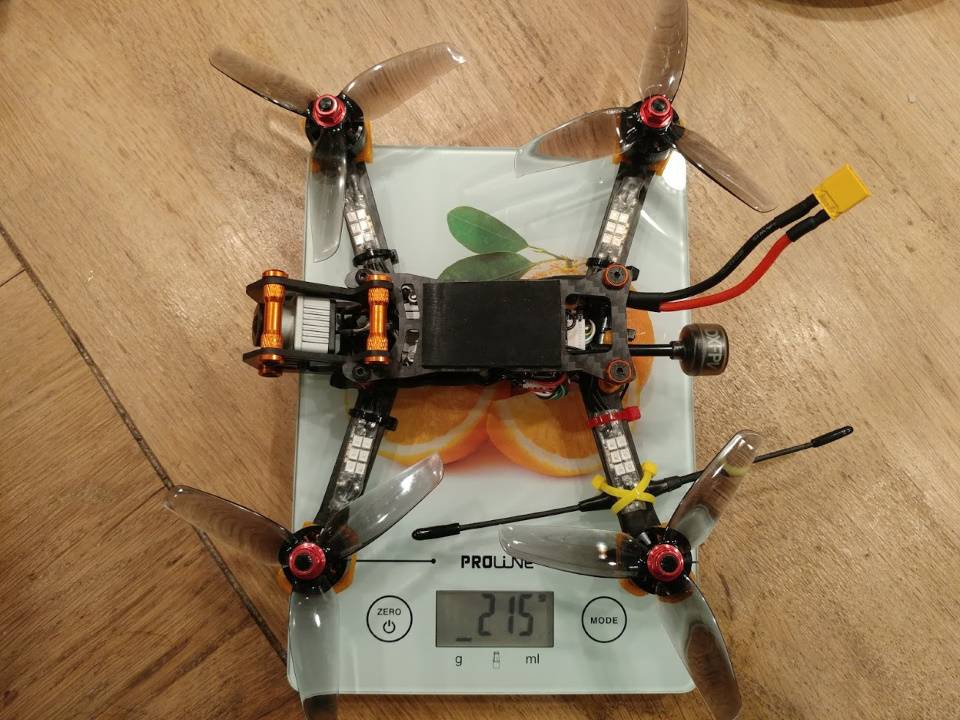


POIDS : 215 grammes
Liste des composants
Frame
AirBlade Intrepid v2 40 € FC
Stack Mamba F722 Mini 85 € ESCs
4 x 4-en-1 dans la stack cf. FC (Mamba 306) Moteurs
4 x EMAX RS1606 - 3300KV 56 € Jeu d'hélices
1 x Gemfan WinDancer 4032 3 € Caméra FPV
Caddx Vista (caméra + VTX + antenne) 162 € Émetteur vidéo
Caddx Vista (caméra + VTX + antenne) Antenne vTx
Caddx Vista (caméra + VTX + antenne) Récepteur radio
Frsky R9 MM 25 € LiPo
GNB 4S 850mAh 80/160C Prix total : 371 €
-
Next57 No DJI ;)
RW 3P 4Sil y a 33 minutes, Jerome a dit :Ah merde, 2 en si peu de temps

Y en a un qui va passer du côté obscur

Noooonnnnnnn je suis fort!!!! (petite référence pour ceux de ma génération: "Vous êtes une femme forte vous n'avez pas besoin du dji..."
)